製品の原理 用語解説
FEATURE DETAIL
製品の原理 用語解説測域センサ
データ出力タイプ測域センサ
データ出力タイプ測域センサとは
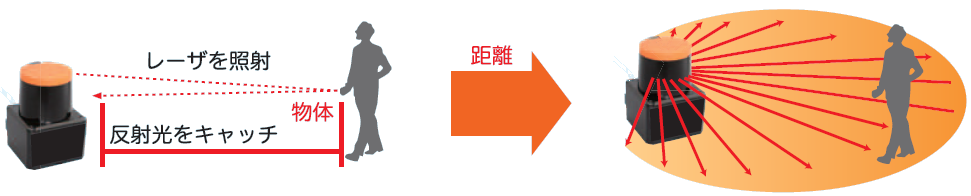
二次元スキャニングを行う測域センサがレーザの反射光から測定した距離のデータをステップ角ごとに出力するセンサです。
自律走行のロボットの環境認識やインタラクティブにおける人の手や足の位置検出に最適です。
自律走行のロボットの環境認識やインタラクティブにおける人の手や足の位置検出に最適です。
ステップ角とは
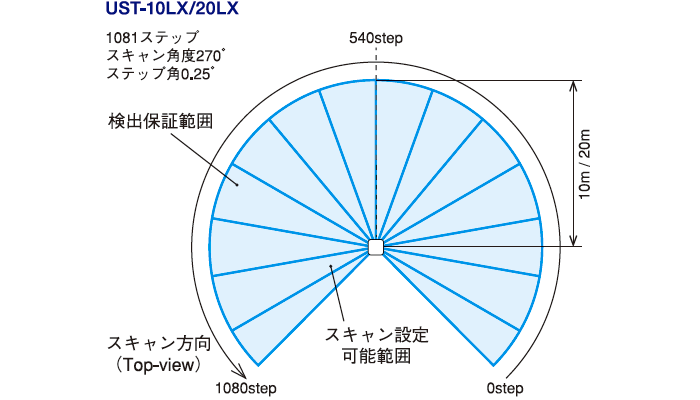
各測域センサの角度分解能です。データ出力タイプの測域センサではステップ角ごとに測定を行い、距離データを出力します。
例えばUST-10LX、UST-20LXの場合測距範囲270°の範囲内を0.25°の角度分解能でスキャニングを行いますので
※0step目も測定を行いますので(測距範囲÷角度分解能)+1となります。
例えばUST-10LX、UST-20LXの場合測距範囲270°の範囲内を0.25°の角度分解能でスキャニングを行いますので
※0step目も測定を行いますので(測距範囲÷角度分解能)+1となります。
データはどうやって取得するの?
データ出力タイプの測域センサは、SCIP (Sensor Communication Interface Protocol)という専用の通信プロトコルを使用してデータを取得いたします。
SCIPには距離データの取得、取得範囲の指定、取得スキャン回数の指定、センサ状態の確認、センサ情報の確認などのコマンドがございますが、機種によって使用できるコマンドが異なります。 詳細に関しましては各測域センサの商品ページより通信仕様書をダウンロードいただけますようお願いいたします。
SCIPには距離データの取得、取得範囲の指定、取得スキャン回数の指定、センサ状態の確認、センサ情報の確認などのコマンドがございますが、機種によって使用できるコマンドが異なります。 詳細に関しましては各測域センサの商品ページより通信仕様書をダウンロードいただけますようお願いいたします。
とりあえず動かしてみたい
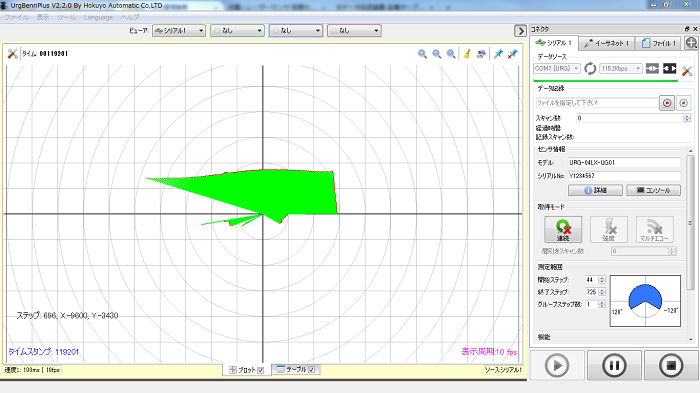
各データ出力測域センサの商品ページにて波形表示ソフトURG Benriがダウンロード可能です。
物体検出を波形イメージとして表示、各ステップごとの距離値をデータテーブルで確認が可能です。
詳細はURG Benriダウンロードファイルに付属しております取扱説明書をご参照ください。
物体検出を波形イメージとして表示、各ステップごとの距離値をデータテーブルで確認が可能です。
詳細はURG Benriダウンロードファイルに付属しております取扱説明書をご参照ください。
こんなところで活躍してます

データ出力タイプ測域センサは環境認識用途に最適で、自律走行ロボットの目の代わりとして広く使用されております。
最近では測域センサで検出した人の手や足などの位置情報を利用して映像を切り替えるなどの体験型インタラクティブでの使用も増えてきております。
最近では測域センサで検出した人の手や足などの位置情報を利用して映像を切り替えるなどの体験型インタラクティブでの使用も増えてきております。
こんな使い方も
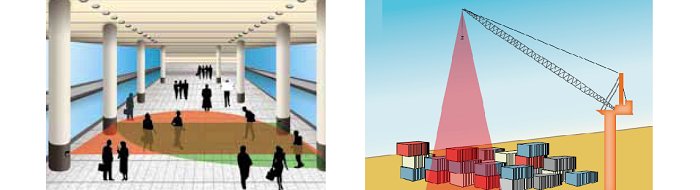
測域センサは広範囲の物体の位置を検出することができるため物体の移動方向もわかります。
人間の動きを感知して行動追跡や建物への入退場者数のカウントなどにも使用できます。
屋外タイプを使用すればクレーンのコンテナ位置検出にも使用が可能です。
人間の動きを感知して行動追跡や建物への入退場者数のカウントなどにも使用できます。
屋外タイプを使用すればクレーンのコンテナ位置検出にも使用が可能です。
製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
- カウンタ
- 自動ドア
製品特集情報
