スペシャルサイト
FEATURE DETAIL
スペシャルサイト大阪・関西万博特集
【非検索】万博展示 第二部 完走!!
万博展示 第二部 完走!!
8/11~17に第二部として万博にて自律走行ロボット「WizURG」のデモンストレーションを行いました。
8月のデモを終え、これにて大阪・関西万博2025の展示参加が終了いたしました。
8月のデモンストレーションは新しく落とし物検知のデモンストレーションを行いました。
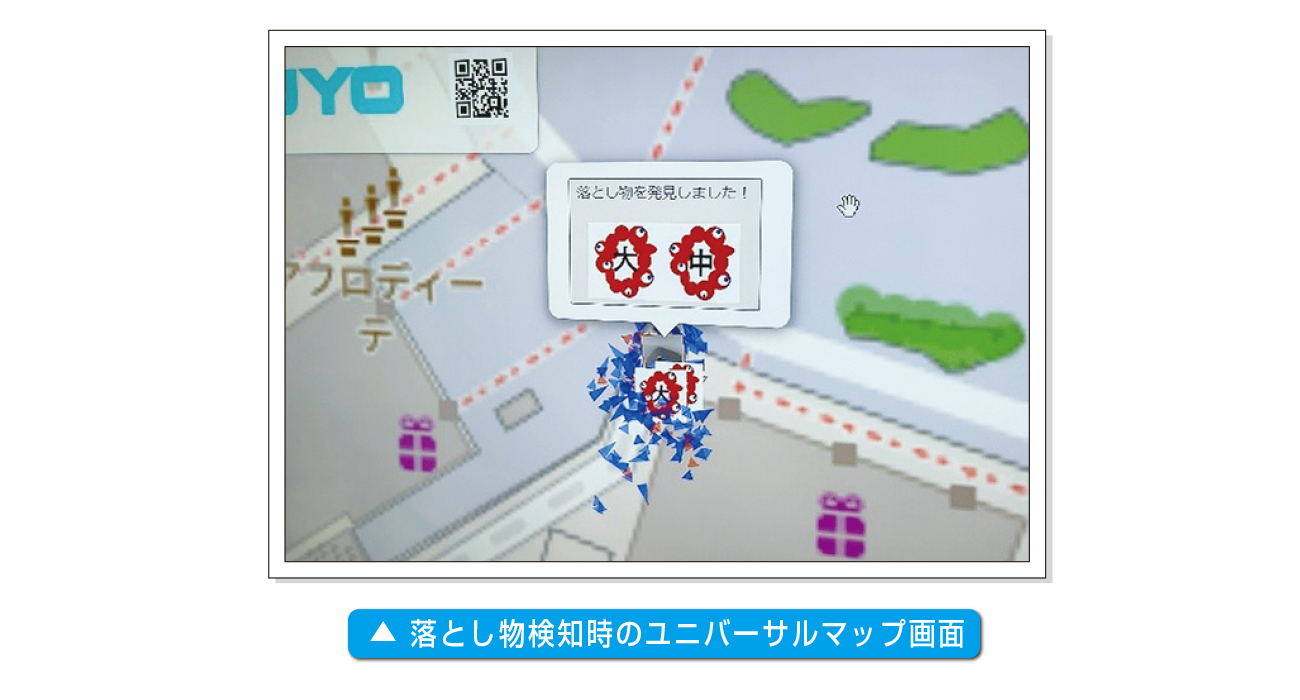
WizURGに搭載している3Dセンサ「YLM-10LX」を使用し、落とし物に見立てた大・中の2種類のミャクミャクぬいぐるみを見つけます。
YLM-10LXの3D点群データからリアルタイムに大きさを識別し、ぬいぐるみを見つけると中之島チャレンジで取り組んでいる「ユニバーサルマップ」に見つけた位置情報とミャクミャクぬいぐるみの種類を共有できます。
落とし物検知のシステムは筑波大学との共同研究のもと開発しました。

屋外でのデモンストレーションでは6月とは異なり、周囲に特徴点が少ない開けたパビリオン前を走行しました。
開けた空間では測域センサだけでの自己位置推定は難しいですが、現在開発中の自己位置推定センサ「SPEL」を使用することで、6月同様、人混みの中でも安定した自律走行デモを行うことができました。

今回の大阪・関西万博の展示には中之島ロボットチャレンジのメンバーとして参加しました。
弊社のロボットの他にも、物を掴んで運べるロボットや不整地でも走行できるロボットを展示しておりました。
様々な環境で異なるサービスを行えるロボットを見て頂くことができ、大阪・関西万博のテーマでもある「いのち輝く未来社会のデザイン」をイメージ頂ける展示ができました。

これからもセンサメーカーとして、人とロボットが共存できる未来社会を実現するために、引き続きセンサ製品の開発を行っていきます。
8月のデモを終え、これにて大阪・関西万博2025の展示参加が終了いたしました。
8月のデモンストレーションは新しく落とし物検知のデモンストレーションを行いました。
WizURGに搭載している3Dセンサ「YLM-10LX」を使用し、落とし物に見立てた大・中の2種類のミャクミャクぬいぐるみを見つけます。
YLM-10LXの3D点群データからリアルタイムに大きさを識別し、ぬいぐるみを見つけると中之島チャレンジで取り組んでいる「ユニバーサルマップ」に見つけた位置情報とミャクミャクぬいぐるみの種類を共有できます。
落とし物検知のシステムは筑波大学との共同研究のもと開発しました。
屋外でのデモンストレーションでは6月とは異なり、周囲に特徴点が少ない開けたパビリオン前を走行しました。
開けた空間では測域センサだけでの自己位置推定は難しいですが、現在開発中の自己位置推定センサ「SPEL」を使用することで、6月同様、人混みの中でも安定した自律走行デモを行うことができました。
今回の大阪・関西万博の展示には中之島ロボットチャレンジのメンバーとして参加しました。
弊社のロボットの他にも、物を掴んで運べるロボットや不整地でも走行できるロボットを展示しておりました。
様々な環境で異なるサービスを行えるロボットを見て頂くことができ、大阪・関西万博のテーマでもある「いのち輝く未来社会のデザイン」をイメージ頂ける展示ができました。
これからもセンサメーカーとして、人とロボットが共存できる未来社会を実現するために、引き続きセンサ製品の開発を行っていきます。
製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
