その他・コラム
FEATURE DETAIL
その他・コラムコラム
FMCW-LiDARとは?構成と原理、ToF方式との比較を解説!
FMCW-LiDARとは?
FMCW-LiDAR(Frequency Modulated Continuous Wave – Light Detection and Ranging)は、従来ミリ波レーダーなどで行われてきた周波数変調連続波による測距方式を、"光"の領域で実現した新世代のLiDAR技術です。
従来のパルス式LiDARとは異なり、連続光を時間的に周波数変調し、LiDARから出た光と物体に当たって跳ね返ってきた光を比較し、その差からビート周波数を計算することで物体までの距離を測定します。
よって、安定した測距性能を実現し、距離と速度検出が同時に可能です。
また、FMCW-LiDARは、優れた耐外乱光性や測定の安定性をもつことから、自動運転車やロボティクス分野で注目されています。
従来のパルス式LiDARとは異なり、連続光を時間的に周波数変調し、LiDARから出た光と物体に当たって跳ね返ってきた光を比較し、その差からビート周波数を計算することで物体までの距離を測定します。
よって、安定した測距性能を実現し、距離と速度検出が同時に可能です。
また、FMCW-LiDARは、優れた耐外乱光性や測定の安定性をもつことから、自動運転車やロボティクス分野で注目されています。
FMCW_LiDARのキーテクノロジー(Photonicモジュール)

FMCW-LiDARの計測原理①【距離検出原理】
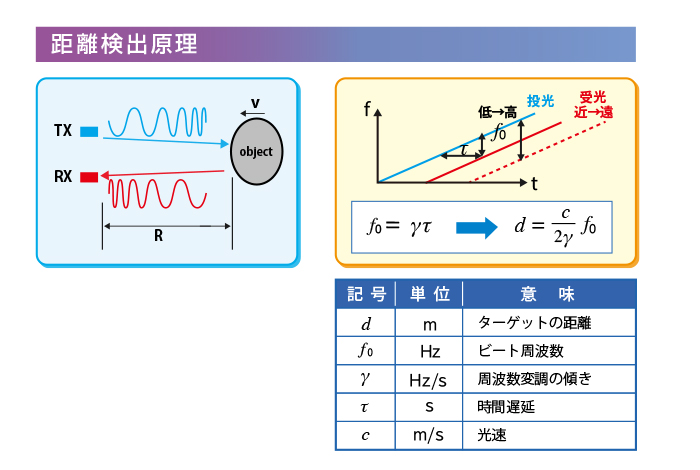
FMCW-LiDARは、時間とともに周波数が変化するレーザ光(連続光)を照射し、物体に当たって跳ね返ってきた光を受け取ります。
この投光と受光を混合して比較すると「ビート信号」と呼ばれる周波数の差が生じます。
このビート周波数を計算・解析することで、ターゲットまでの距離を正確に測定します。
この投光と受光を混合して比較すると「ビート信号」と呼ばれる周波数の差が生じます。
このビート周波数を計算・解析することで、ターゲットまでの距離を正確に測定します。
FMCW-LiDARの計測原理②【速度検出原理(ドップラー効果)】
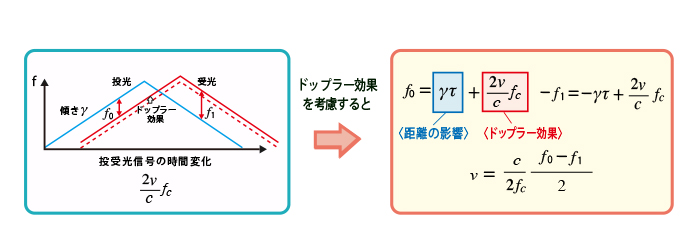
ターゲットが移動している場合、跳ね返ってくる光(受光)の周波数が少し変化します。
これは「ドップラー効果」と呼ばれる現象です。
そのため、アップチャープとダウンチャープという2つの異なる周波数変調を用いることで、
ビート周波数に含まれる速度による周波数のズレを特定します。
この周波数差を解析することで、ターゲットの速度を算出することができます。
これは「ドップラー効果」と呼ばれる現象です。
そのため、アップチャープとダウンチャープという2つの異なる周波数変調を用いることで、
ビート周波数に含まれる速度による周波数のズレを特定します。
この周波数差を解析することで、ターゲットの速度を算出することができます。
FMCW-LiDARのメリット
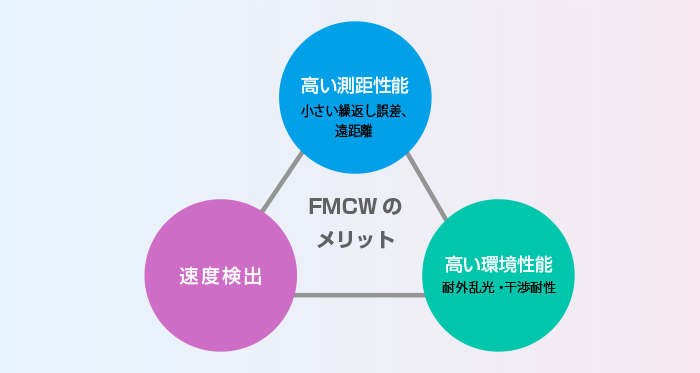
・高い測距性能
周波数差を利用して距離を測るため、従来のパルス式よりも安定した測定が可能です。
繰り返し誤差が少なく、遠くの物体も正確に測ることができます。
・速度検出機能
ドップラー効果により、ターゲットが移動している場合でも、その移動速度と距離を同時に直接測定できます。
・環境性能(干渉耐性・外乱光耐性)
コヒーレント検出方式により、自分が送信した光と位相関係のない外部光源(太陽光、街灯、他のLiDARなど)の
影響を受けにくく、安定した動作が可能です。
以上のメリットにより、屋外で使用されるサービスロボットやインフラ計測分野において、幅広く利用できると考えます。
周波数差を利用して距離を測るため、従来のパルス式よりも安定した測定が可能です。
繰り返し誤差が少なく、遠くの物体も正確に測ることができます。
・速度検出機能
ドップラー効果により、ターゲットが移動している場合でも、その移動速度と距離を同時に直接測定できます。
・環境性能(干渉耐性・外乱光耐性)
コヒーレント検出方式により、自分が送信した光と位相関係のない外部光源(太陽光、街灯、他のLiDARなど)の
影響を受けにくく、安定した動作が可能です。
以上のメリットにより、屋外で使用されるサービスロボットやインフラ計測分野において、幅広く利用できると考えます。
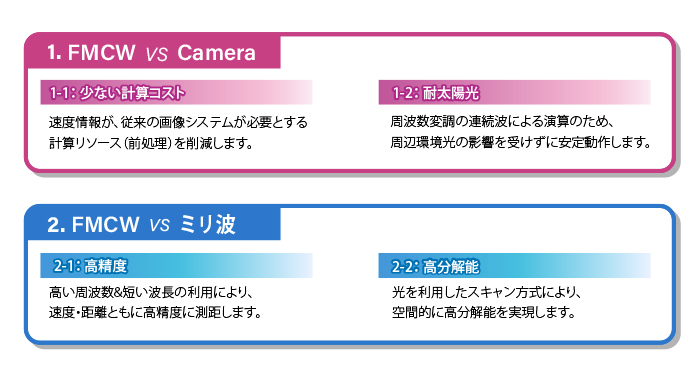
ToF-LiDARとの違い
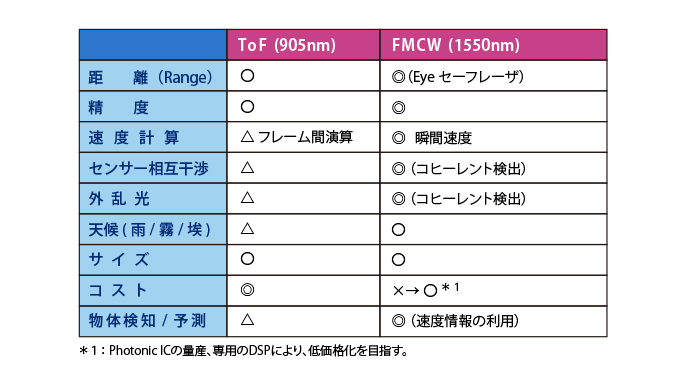
他の技術との違い
FMCW-LiDARの出力例
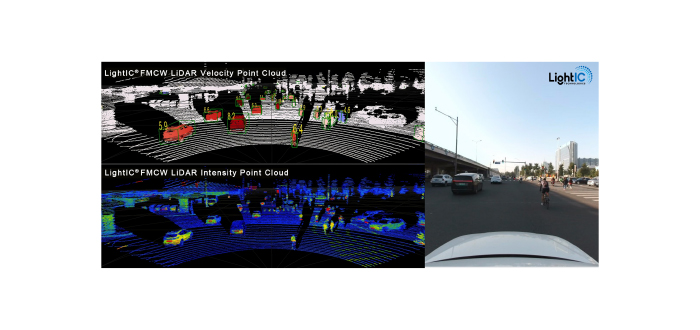
▲車内から前方の様子をLiDARで捉え、バイクの人をそれぞれ認識している様子。
下段は、FMCWの速度出力(速度情報を利用して、簡単にバイクの人を抽出し、ラベリング処理した様子)
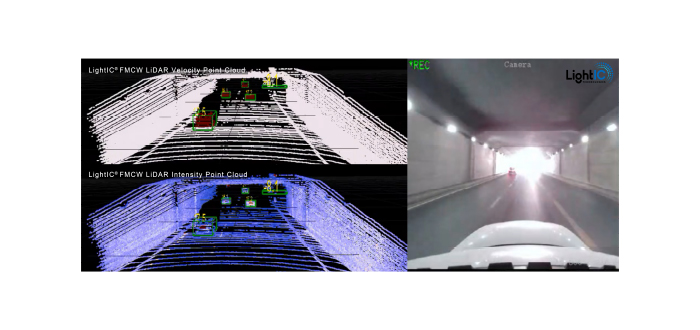
▲車内から前方のトンネル外の様子をLiDARで捉えたときの出力。
(右写真のようにトンネル外は、カメラでは白飛びしている)
上段は強度出力、下段は速度出力。速度情報を利用して、前方の車を認識している様子。
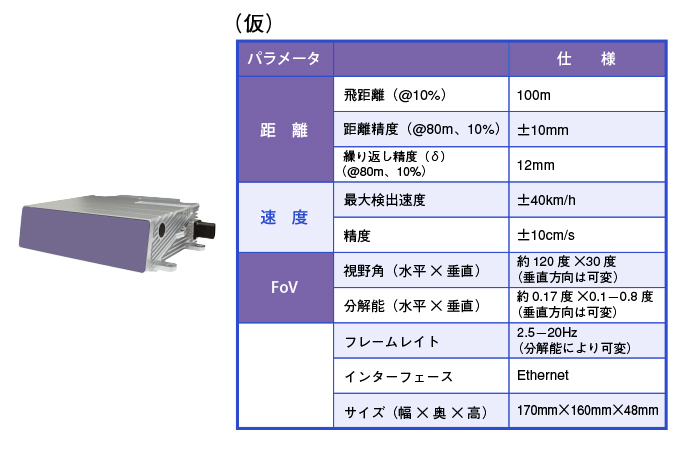
FMCW-LiDAR仕様
開発中のセンサに関するお問い合わせは、下記ボタンをクリック!
LightIC社について

FMCW-LiDARは、米国スタートアップLightICテクノロジーズ社と協業により開発中です。
LightICは2019年にシリコンバレーで設立され、世界中に研究開発センターと製造施設を有しています。
同社は「LiDAR on a Chip」を統合する高度なシリコンフォトニクス技術を有しています。
次世代FMCW(周波数変調連続波)LiDARチップおよびシリコンフォトニクスチップをベースとしたシステム、
そしてFMCW+OPA(光フェーズドアレイ)技術を活用した将来の長距離ソリッドステートLiDARの開発・製造に注力しています。
LightICは2019年にシリコンバレーで設立され、世界中に研究開発センターと製造施設を有しています。
同社は「LiDAR on a Chip」を統合する高度なシリコンフォトニクス技術を有しています。
次世代FMCW(周波数変調連続波)LiDARチップおよびシリコンフォトニクスチップをベースとしたシステム、
そしてFMCW+OPA(光フェーズドアレイ)技術を活用した将来の長距離ソリッドステートLiDARの開発・製造に注力しています。
製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
