その他・コラム
FEATURE DETAIL
その他・コラムコラム
3D LiDARの原理と解説 日本製LiDAR YVTシリーズ
LiDARとは
LIDARとはLight Detection and Rangingの略で、一般的には光をスキャニングしながら検出物までの距離を測定するものをいい、その計測されたデータを使って、衝突防止や自動走行などの用途に活用されています。
2D LiDARと3D LiDAR
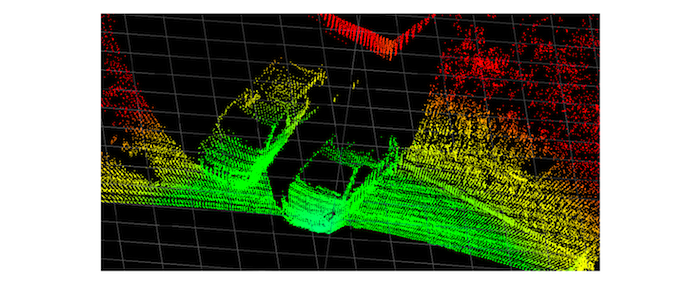
2D LiDARは、距離測定光をモータで回転させることにより、光を水平に走査させることで 平面の距離情報の取得を実現しています。また、3D LiDARでは、高さ方向の情報も得るため、光源を縦に複数個設置させることや、ミラーなどで縦方向のスキャンを追加、また各種の光を曲げる技術を利用して高さ方向の距離情報の取得を実現しています
一般的な工場や倉庫、ビル内のオフィス環境などの平面的な環境では、高さ方向のデータをあまり活用する必要がなく、処理する距離情報が少なくて済む2D LiDARが好まれていますが、屋外での走行となった場合は縁石や路面の傾斜などがあり、立体的な計測が必要となるため3D LIDARが必要となってきます。
一般的な工場や倉庫、ビル内のオフィス環境などの平面的な環境では、高さ方向のデータをあまり活用する必要がなく、処理する距離情報が少なくて済む2D LiDARが好まれていますが、屋外での走行となった場合は縁石や路面の傾斜などがあり、立体的な計測が必要となるため3D LIDARが必要となってきます。
北陽電機製3D LiDAR YVTシリーズの原理
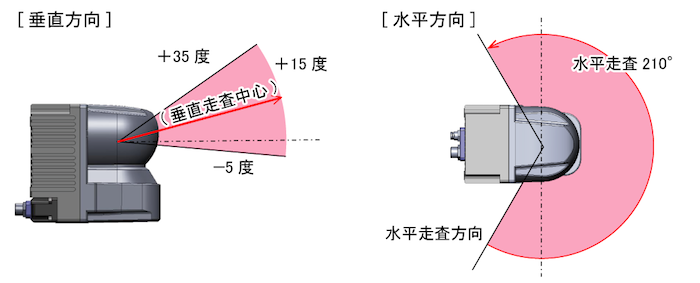
北陽電機製3D LiDARのYVTシリーズは一般的にメカニカルスキャンという方式を採用しており、モータで平面方向の走査を行いながら、ミラーを上下に走査させることで水平方向210度、垂直方向40度の3Dスキャンを実現しています。
走査と解像度点群数
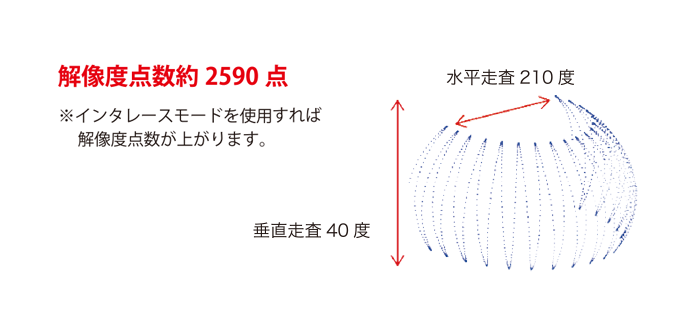
YVTのモータによる水平走査とミラーの垂直走査を組み合わせた投光走査イメージが上図です。水平方向は、正面を中心に左右105°以上、全体で210°以上を走査、垂直方向は40°の往復にて走査、これにより、投光の光線は正弦波状の軌跡を描くように走査します。
解像点数は一周あたり2590点になりインタレース機能を用いることでさらに点群数を上げることが可能です。
解像点数は一周あたり2590点になりインタレース機能を用いることでさらに点群数を上げることが可能です。
インタレース機能
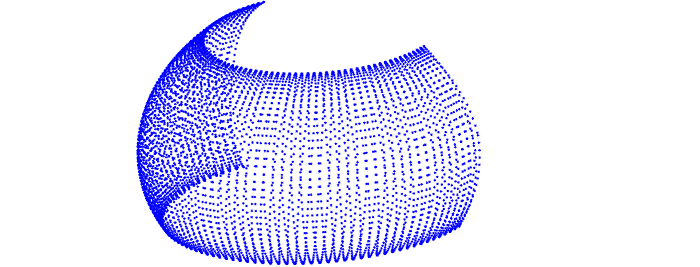
あえて走査位置をずらすことで解像度を向上させるインタレースという機能があります。
例として4インターレースにて計測する場合は、4週分の走査位置をずらし、この4周分のデータを重ねることで、解像度が4倍のデータを取得することができます。
製品の詳しいスペックはこちらから

関連コラムを読む
製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
