製品詳細
PRODUCT DETAIL

YVT-35LX-F0/FK
測域センサデータ出力タイプ
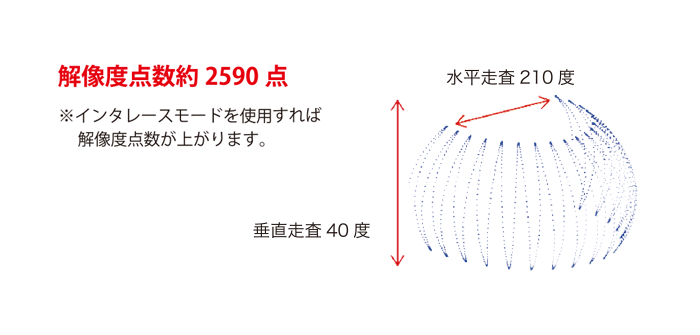
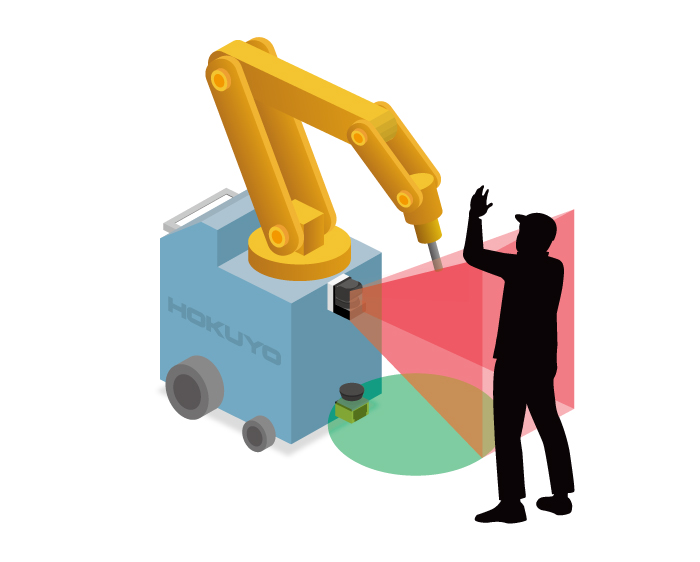
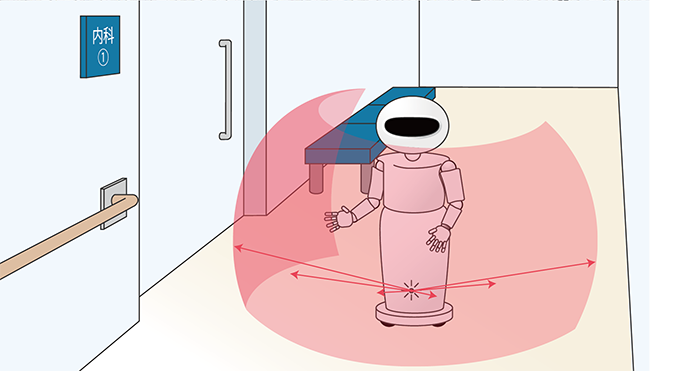
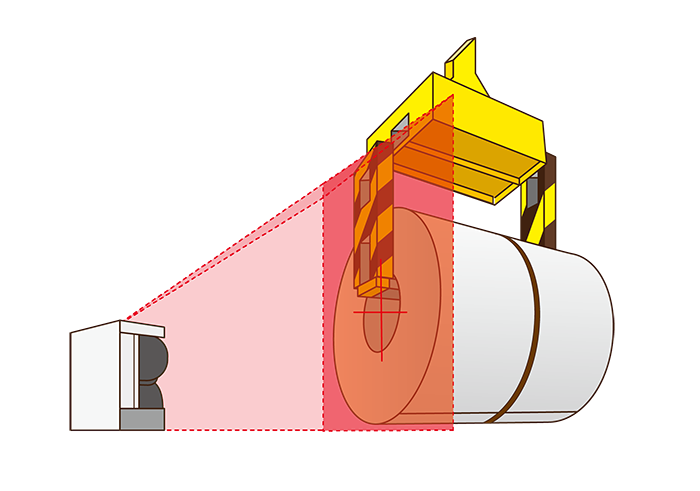
3次元測域センサ(3D LiDAR)距離35m(最大)、水平210°、垂直40°の範囲を3次元計測するレーザスキャナ。独自の走査方法により縦方向の抜けが少なく、2590点(最大518000点)の豊富な点群データを出力。IMUやPPS入力など便利な機能も搭載。ロボットやAGV(無人搬送台車)の環境認識(SLAM)用途に。ROS対応。
※型式については、型式一覧をご参照ください。
製品概要
特徴
●測距原理にはパルス光によるTOF方式を採用しています。
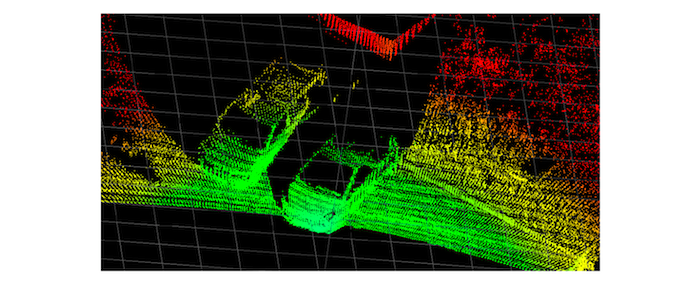
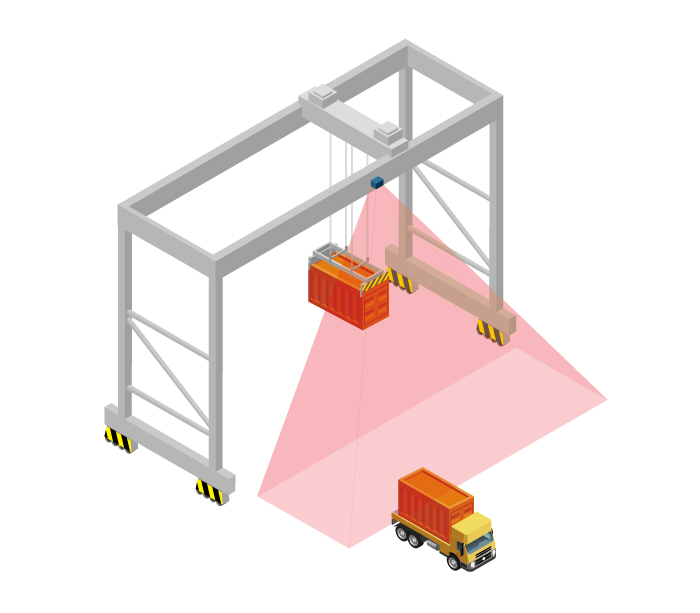
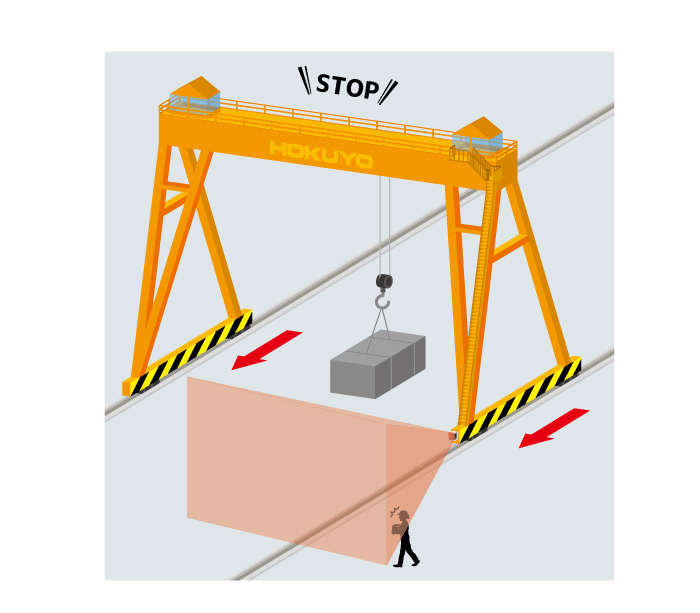
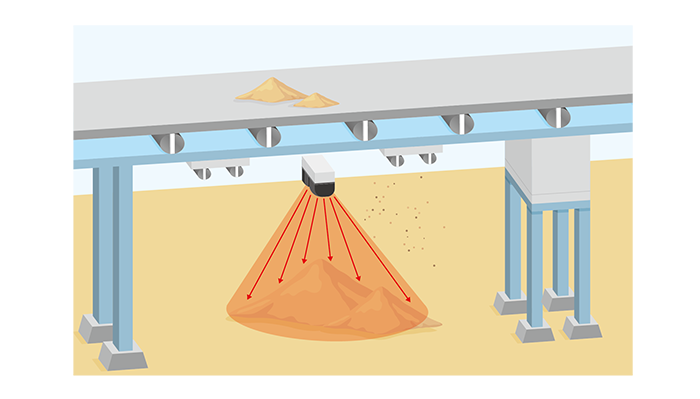
●3次元の広範囲にレーザ光を照射し、2次元では計測が難しかった幅、奥行き、高さを測距します。
取得した測距データを、X/Y/Z座標に変換できるライブラリを公開致しました。
こちらのページからダウンロードできます
●3次元の広範囲にレーザ光を照射し、2次元では計測が難しかった幅、奥行き、高さを測距します。
取得した測距データを、X/Y/Z座標に変換できるライブラリを公開致しました。
こちらのページからダウンロードできます
広範囲計測
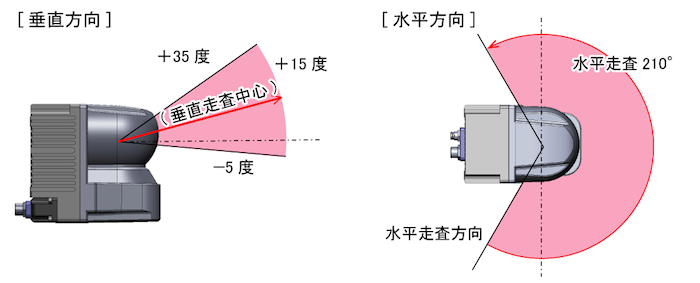
水平方向210°垂直方向40°の広範囲にレーザ光を照射し、反射光により取得した点群データを出力します。
検出距離は前方方向35m、横方向14mと長距離性能を実現しました。
検出距離は前方方向35m、横方向14mと長距離性能を実現しました。
製品紹介動画
インタレースモード機能で解像点数をアップ
レーザ光の照射位置を周期毎にずらし、点群数を増やして解像度を上げる機能です。
最大で水平方向20倍、垂直方向10倍まで密度を上げる事ができます。
※最大密度の時、HD(High Density)モードとなります。
最大で水平方向20倍、垂直方向10倍まで密度を上げる事ができます。
※最大密度の時、HD(High Density)モードとなります。
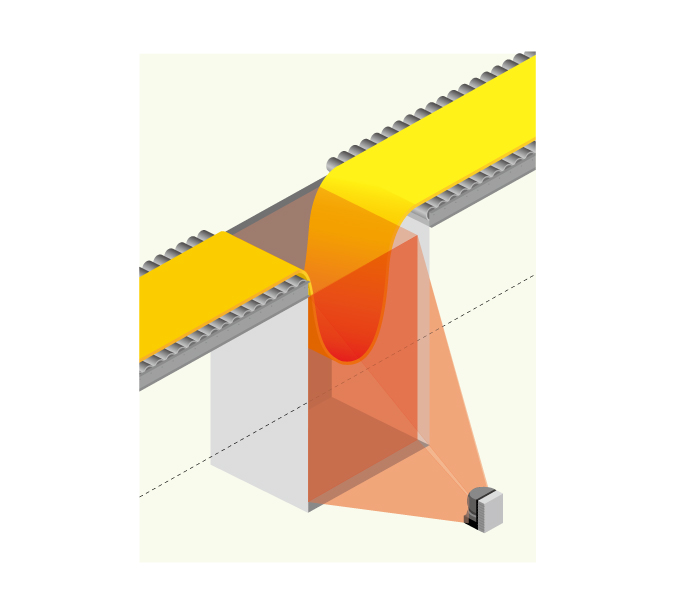
マルチエコー対応で屋外用途にも対応
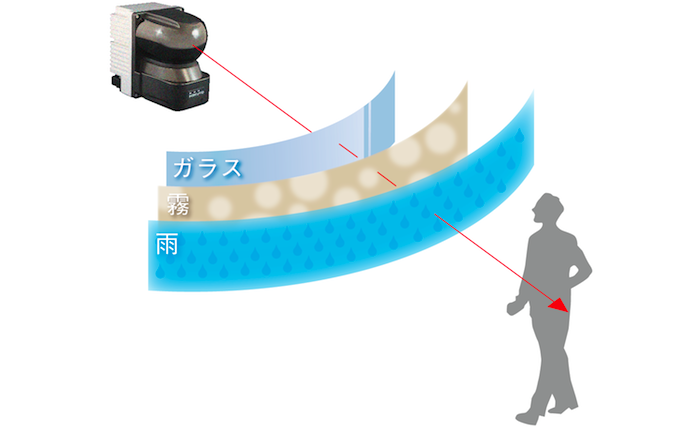
1方向への距離計測に対して、雨や霧等の複数のエコー(反射光)を受光し、それぞれから距離データを得る機能です。
屋外使用での雪、雨、塵などの浮遊物や 前面カバーの分別に有効です。
本製品は4エコー対応品です。
屋外使用での雪、雨、塵などの浮遊物や 前面カバーの分別に有効です。
本製品は4エコー対応品です。
IMU(ジャイロ)センサ搭載で姿勢データから3Dデータ補正が容易に
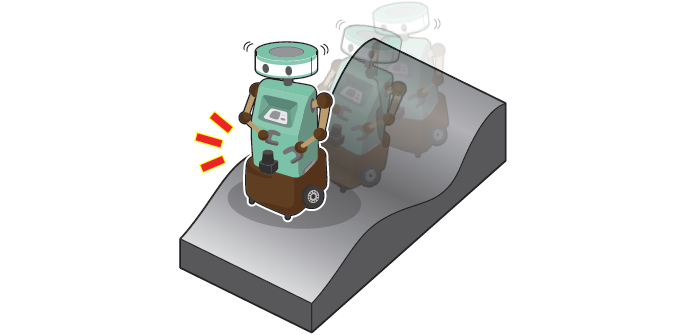
角速度、加速度を検出します。内蔵IMUなので時間補正が必要ありません。
ロボットや無人搬送車が坂を走行する際、傾き(姿勢)や加速度が分かるので状況に応じた制御が可能になります。
※InvenSense製MPU-6500を使用しています。
詳細データにつきましてはメーカカタログを参照してください。
ロボットや無人搬送車が坂を走行する際、傾き(姿勢)や加速度が分かるので状況に応じた制御が可能になります。
※InvenSense製MPU-6500を使用しています。
詳細データにつきましてはメーカカタログを参照してください。
走査イメージ
耐環境性に優れています
保護構造IP67 、耐周囲照度100,000lx、耐衝撃10Gと様々な環境下での使用用途に適しています。
PPS(Pulse Per Second)入力
GPSと併用する場合、PPS信号によりセンサのタイムスタンプをリセットし、累積誤差を無くします。
製品動作動画
製品検証動画
導入事例
型式一覧
■本体
■電源ケーブル (別売り)
※YVT1台に1本必要となります。
■Ethernetケーブル (別売り)
※YVT1台に1本必要となります。
| 型式 | 品コード | |
| YVT-35LX-F0 | UYVT002 | |
| YVT-35LX-FK(静音タイプ) | UYVT003 | |
■電源ケーブル (別売り)
| 型式 | 品コード | 長さ |
| YVT-C003 | UZ00092 | 3m |
| YVT-C005 | UZ00093 | 5m |
■Ethernetケーブル (別売り)
| 型式 | 品コード | 長さ |
| YVT-ENET003 | UZ00095 | 3m |
| YVT-ENET005 | UZ00096 | 5m |
電源ケーブル

Ethernetケーブル

製品仕様
| 名称 | 3次元測域センサ (3D LIDAR) |
| 型式 | YVT-35LX-F0 YVT-35LX-FK(静音タイプ) |
| 光源 | 半導体レーザ 波長=905nm この製品はレーザー安全クラス1製品です。(Class 1 Laser Product) |
| 電源 | DC12V/24V(動作電圧範囲10~30V) 消費電流(DC12V) :起動時1.5A/通常時0.8A |
| 水平走査角度 | 210度以上 ピッチ6度 精度±0.125° |
| 垂直走査角度 | 40度 (-5度~35度) 精度±2° |
| データ点数 (分解能) |
2590点以上 (インターレースなし、20fps) 518000点以上 (インターレースHDモード、0.1fps) |
| インターレース | 水平:最大 20 倍 HDモード:水平 20 倍 × 垂直 10 倍 |
| 検出距離 | 水平走査 -45°<θ<45° 0.3-35m(白紙) 0.3-11m(黒紙 反射率10%) -75°<θ≦-45°,45°≦θ<75° 0.3-20m(白紙) 0.3- 6m (黒紙 反射率10%) θ≦-75°,75°≦θ 0.3-10m(白紙) 0.3-3m (黒紙 反射率10%) ※上記は垂直走査の上向き15°(垂直走査中心)での値 上向き35°、下向き-5°では上記の70%に減衰する。 |
| 測距精度 (周囲25℃時) |
中央 白紙15m以下:±50mm 白紙15m~ :±100mm |
| 繰り返し精度 (周囲25℃時) |
中央 白紙15m以下:σ< 20mm 白紙15m~ :σ< 35mm |
| 検出エコー数 | 最大4 echoes |
| 水平走査速度 | 20Hz |
| 垂直走査速度 | 1200Hz |
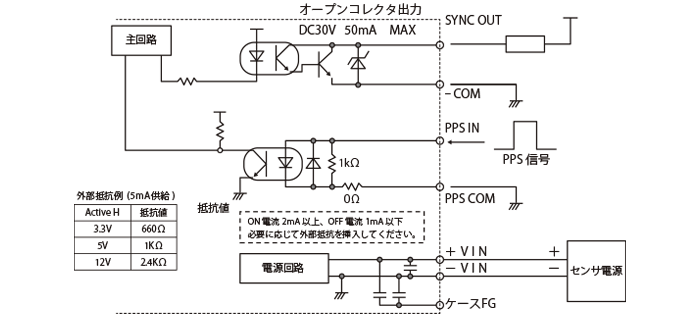
| 入出力 | PPS入力 1点(フォトカプラ入力 Active High 2mA以上) 同期出力 1点(フォトカプラ・オープンコレクタ出力 DC30V 50mA MAX) |
| インタフェース | Ethernet(TCP/IP) 100BASE-TX(Auto-negotiation) |
| 構造 | IP67(無通電) 水中使用不可 |
| 質量 | YVT-35LX-F0 約650g YVT-35LX-FK 約1kg |
| 大きさ | YVT-35LX-F0 70mm×106mm×95mm(W×D×H) YVT-35LX-FK 76mm×106mm×95mm(W×D×H) |
| 温度/湿度 | -10~50℃ 85%以下(結露をしないこと) |
| 振動 | 印加周波数/加速度: 10~57.5Hz /複振幅1.5mmp-p 57.5Hz~150Hz /98m/s2 (10G) 掃引速度: 1 octave / min (3.9sec / sweep) 耐久時間: 上下/前後/左右 各2H(動作、耐久共に) |
| 発生音 | YVT-35LX-F0 前方向53dB(距離1m地点)周波数1200Hz 参考値 YVT-35LX-FK 前方向47dB(距離1m地点)周波数1200Hz 参考値 |
| 使用周囲照度 | 100,000 lx(直接太陽光方向は除く) |
| ジャイロ | 加速度及び角速度(InvenSense MPU-6500)#1 |
| 通信プロトコル | VSSP 2.1 |
#1 詳細はメーカのジャイロカタログを参照してください。
(注)電源を入れてから60秒程度はウォーミングアップ時間です。ウォーミングアップ中は距離データが出力されません。
また、垂直走査が安定するまで2~3分ほどの時間が必要です。
その間は上方向にノイズデータが出力されることがあります。
(注)出荷時のテストは 正面方向のみです。
方向により検出距離と精度が低下する可能性があります。また、上記記載の精度は周囲温度25℃での値です。
(注)ファーストエコーで上方向を計測した際にノイズが検出されることがあります。
(注)きわめて反射率の低いものは中距離で検出できても近距離で計測できないことがあります。
■免責事項
○本センサは安全認証を受けた製品ではありません。
○センサは機械指令に基づく人体検知センサとしてはご利用頂けません。
○本センサはレーザ光を用いて計測を行なっているため、強い外乱光が入った場合や対象物からの反射光が得られない場合、
動作が不安定になる可能性があります。
○本センサは環境条件(雨・雪・霧など)や光学カバーの汚れが原因で、動作が不安定になる可能性があります。
○本センサを取り付けるシステム製造者は、安全に関する全ての規則及び規制を遵守する責任があります。
○本センサが大量破壊兵器、人類を殺傷する目的を持つ武器・装置、またそれに関連する技術等へ使用の恐れがある場合、
もしくは使用が判明した場合は、日本国法の外国為替および外国貿易法/輸出貿易管理令に準拠し販売を差し止める
ことがあります。
また、製品の輸出に関しては、国際的な平和や安全を維持するために、司法/輸出貿易管理令に
準拠した手続きを行います。
○ご使用前には、仕様書を熟読して下さい。
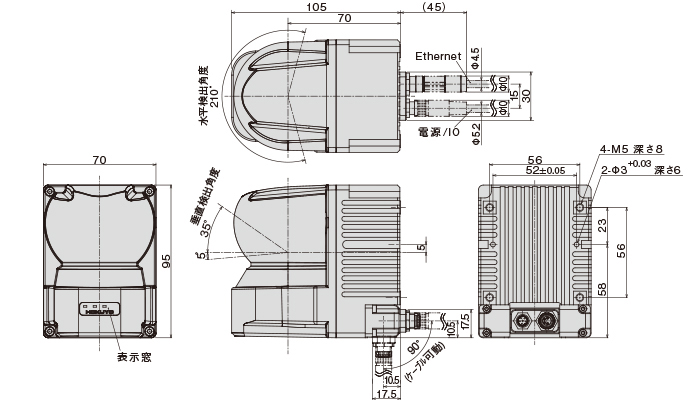
外形図
YVT-35LX-F0(本体)
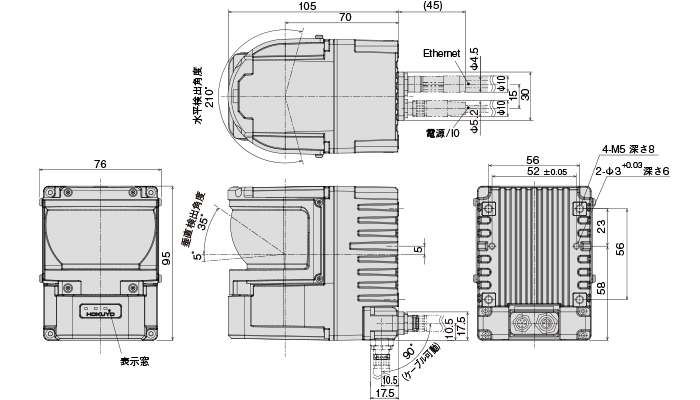
YVT-35LX-FK(本体)
入出力回路
コネクタピンアサイン
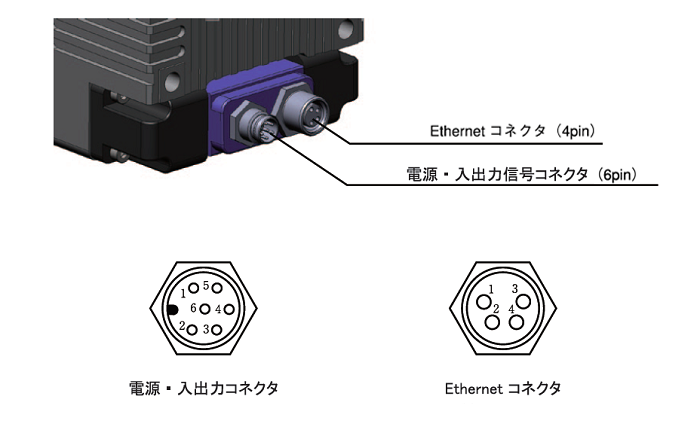
| ■電源・入出力信号コネクタ | ■Ethernetコネクタ |
|
|
電源ケーブル

| ピン番号 | 機能 | 線色 |
| 1 | +VIN (DC12/24V) | 茶 |
| 2 | PPS COM | 白 |
| 3 | -VIN (0V) | 青 |
| 4 | -COM | 黒 |
| 5 | SYNC OUT | 灰 |
| 6 | PPS IN | 桃 |
Ethernetケーブル

|
|
||||||||||||||||||||||||||||||||||||||||||||||||
入出力回路
各種ダウンロード
ダウンロードの前に
ファイルのダウンロードは会員様のみが可能です。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
資料ダウンロード用使用許諾
弊社各種商品の製品仕様・図面資料・各種資料及びソフトウェアのダウンロードに際して、事前にご利用規約をお読みいただき、ご理解・ご同意の上でご利用いただくようお願い申し上げます。
ご同意いただけない場合、ダウンロードページへの登録・承認ができないことをご了承ください。(なお、本利用規約は予告なく変更することがございます。)
利用規約
- 知的財産権
-
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
(以下コンテンツという)の著作権およびその他の権利は、当社またはその供給者が有します。 - 当社が当ウェブサイトに掲載しているコンテンツの二次的利用(複製、転用、改変、解析、送信、譲渡、貸与、使用許諾、及び営業活動または営利を目的とする使用等)は、事前に承諾がない限り固く禁止いたします。各ダウンロードサイトやコンテンツに個別の使用条件を記載している場合は、それらの利用条件を本利用規約に優先させて適用させていただきます。
- 当社は当ウェブサイトによるコンテンツの提供により、コンテンツに含まれる発明、デザイン等に対する特許権、意匠権その他の知的財産権の譲渡または当該知的財産権に基づくいかなる権利の許諾を行うものではありません。
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
- 免責事項
-
当社は、当ウェブサイトに掲載した情報には細心の注意を払っておりますが、以下の点に責任を負うものではありません。
- 掲載された情報が常に最新版であり、適時適切に更新、または訂正されていること。
- 掲載された情報が正確で、有用で、安全であること。
- 当ウェブサイトの情報の変更、削除、公開の中断、中止等、ご利用になったことによるお客様に生じた損害。
- 当ウェブサイトの利用によって起きた一切の損害。
ダウンロード一覧
| 分類 | ファイル名 | ファイル 容量 |
更新日 | ダウンロード |
|---|---|---|---|---|
【RS2】YVT-35LX-F0 製品仕様書 |
469KB |
2024-10-02 |
||
【RS2】YVT-35LX-FK 製品仕様書 |
434KB |
2024-10-02 |
||
【RS2】YVT-35LX 通信仕様書 |
471KB |
2025-12-18 |
||
【RS2】波形表示アプリケーション Ver2.1.0 |
15,003KB |
2025-11-26 |
||
【RS】IP Discovery_2.4.0(rev.104)(IPアドレス変更ツール)ダウンロード時にブロックされた場合の対処方法はこちらのURLを参照してください https://www.hokuyo-aut.co.jp/products/data.php?id=242 |
19,416KB |
2026-04-28 |
||
【RS2】YVT-35LX-F0 2DCAD (DXF) |
171KB |
2024-10-02 |
||
【RS2】YVT-35LX-FK 2DCAD(DXF) |
129KB |
2024-10-02 |
||
【RS2】YVT-35LX-F0 3DCAD(IGES/STEP/Parasolid) |
2,843KB |
2024-10-02 |
||
【RS2】YVT-35LX-FK 3DCAD(IGES/STEP/Parasolid) |
6,005KB |
2024-10-02 |
||
【RS2】YVT-35LX 総合カタログ |
2,922KB |
2026-04-02 |
プログラミングについて

【URG Network】
データ出力タイプ測域センサのプログラミングについて説明しているサイトです。
YVTの通信プロトコルであるVSSPについての解説、 URG 3Dライブラリページをご参照ください。
データ出力タイプ測域センサのプログラミングについて説明しているサイトです。
YVTの通信プロトコルであるVSSPについての解説、 URG 3Dライブラリページをご参照ください。

【技術コミュニティ】
測域センサ(データ出力タイプ)の専門的なプログラミングやソフトに関するご相談については、
技術コミュニティもご用意しております。
※日本語でも大丈夫です!
測域センサ(データ出力タイプ)の専門的なプログラミングやソフトに関するご相談については、
技術コミュニティもご用意しております。
※日本語でも大丈夫です!
よくある質問
-
PCに接続しましたがPCがセンサを認識しません。
PCのIPアドレスを設定する必要があります。 詳しくは「イーサネットタイプの測域センサをPCに接続する」をご参照ください。
-
IPの変更、初期化はどうすればいいですか。
専用アプリケーション(IP Discovery )にて IP 変更および初期化が可能です。各種ダウンロードにてダウンロード可能です。
-
光学面が汚れてしまいましたが清掃の方法を教えてください
製品の使い方「光学窓のお手入れ方法」に記載がございますのでご参照ください。
-
取得した測距データを、X/Y/Z座標に変換するにはどうしたらいいですか
サンプルプログラムが下記にありますので参考にしてください。
「URG 3Dライブラリ」 -
センサとIMUのXYZの座標がちがう。
センサ内部のIMU取付の関係で
センサ X→ IMU Z
センサ Y→ IMU X
センサ Z→ IMU Y となります。
その他詳細についてはIMU(InvenSense MPU-6500)のメーカカタログを参照お願いします。
同カテゴリの他の製品を見る









製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
