製品詳細
PRODUCT DETAIL

YLM-10LX
測域センサデータ出力タイプ
駆動部(メカ)を一切使用していないソリッドステート3D測域センサ(LiDAR)。
距離0.3~10m(反射率10%)、最大視野角110°(H)×80°(V)。
視野角や解像度などのパラメータをソフトの設定次第でダイナミックに
変更することが可能。
AMR、フォークリフト、サービスロボット等のアプリケーションに最適です。
ROS対応。
製品概要
ソリッドステートビームステアリング技術 LCM
Lumotive社と共同で開発したソリッドステート3D測域センサ(LiDAR)。
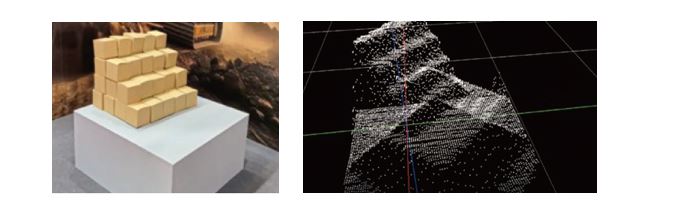
液晶の偏光特性を利用して光の向きを変える技術LCM(Light Control Metasurface)を採用し、駆動部を一切使用しないソリッドステートスキャニングを実現。
LCMを用いて、水平方向のライン光を垂直方向にスキャンし、1ラインずつ受光しているため、TOFカメラと比較してマルチパス干渉を低減でき、距離測定が安定します。
従来の機械式スキャンでは実現できなかった新しい価値を提供します。
※LCMはLumotive社が特許を持つ独自技術です。

https://www.lumotive.com/technology
液晶の偏光特性を利用して光の向きを変える技術LCM(Light Control Metasurface)を採用し、駆動部を一切使用しないソリッドステートスキャニングを実現。
LCMを用いて、水平方向のライン光を垂直方向にスキャンし、1ラインずつ受光しているため、TOFカメラと比較してマルチパス干渉を低減でき、距離測定が安定します。
従来の機械式スキャンでは実現できなかった新しい価値を提供します。
※LCMはLumotive社が特許を持つ独自技術です。
https://www.lumotive.com/technology
LCMを用いたソリッドステートスキャニングの特徴
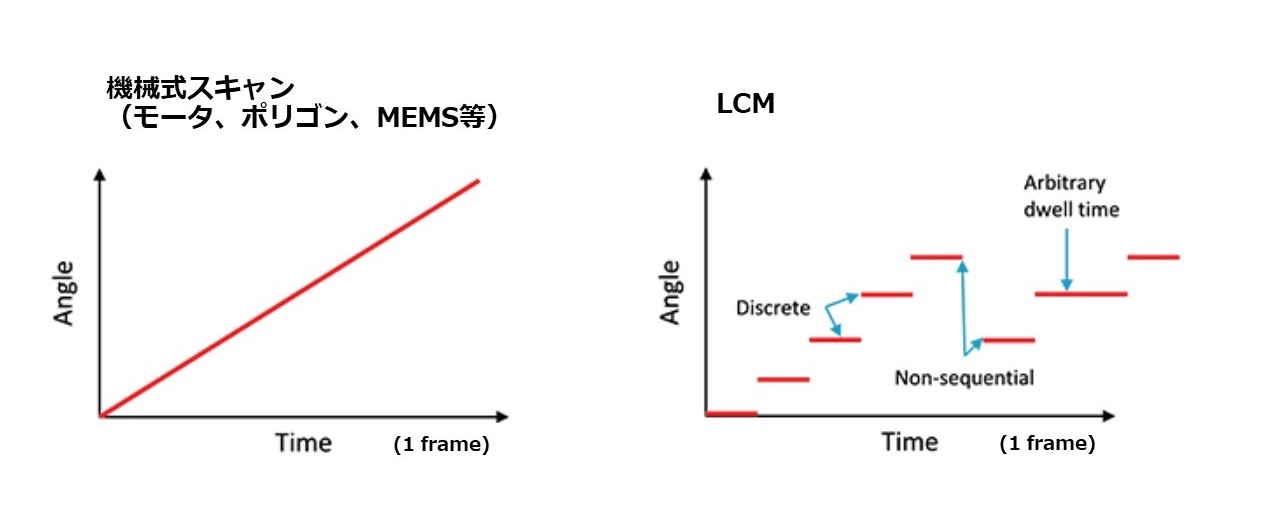
従来の機械式スキャンでは、時間軸に対して検出範囲が一定で変化していく、
すなわち固定の範囲を連続的にスキャンするのに対し、
LCMを用いたソリッドステートスキャンでは、ソフトの設定次第で、 検出範囲(視野角)や解像度等を
ダイナミックに且つ、 解像度・検出範囲・フレームレートを柔軟にランダムにスキャン可能です。
すなわち固定の範囲を連続的にスキャンするのに対し、
LCMを用いたソリッドステートスキャンでは、ソフトの設定次第で、 検出範囲(視野角)や解像度等を
ダイナミックに且つ、 解像度・検出範囲・フレームレートを柔軟にランダムにスキャン可能です。
複数の視野(FOV)を設定可能
1台の測域センサで、複数の視野(FOV)を設定し、同時にスキャンすることができます。
ソフトの設定次第で、各視野角に対して解像度などのパラメータをダイナミックに変更することが可能で、
特定の場所や対象物だけを同時にスキャンすることも可能となります。
ソフトの設定次第で、各視野角に対して解像度などのパラメータをダイナミックに変更することが可能で、
特定の場所や対象物だけを同時にスキャンすることも可能となります。
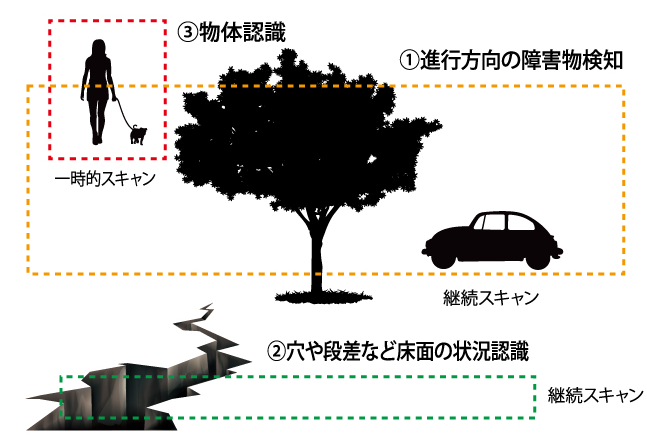
用途

AGV/AMR、フォークリフト、サービスロボット等の3D障害物検知、形状認識に最適です。
型式一覧
■本体
■電源用コネクタ付きケーブル (別売)
■Ethernetコネクタ (別売)
| 型式 | 品コード | |
| YLM-10LX | UYLM001 | |
■電源用コネクタ付きケーブル (別売)
| 型式 | 品コード | 長さ |
| YLM-C003 | UZ00169 | 3m |
■Ethernetコネクタ (別売)
| 型式 | 品コード | 長さ |
| YLM-ENET002 | UZ00170 | 2m |
製品仕様
| 品 名 | 3次元測域センサ(3D LiDAR) |
| 型 式 | YLM-10LX |
| 電源電圧 | DC15 - 30V |
| 消費電力 | 25W以下、DC24V:1A |
| 測定距離*†※1 | 0.3m ~ 10m (反射率10%) |
| 1m~15m(反射率90%) | |
| 視野角 (FOV) | 110°(H)×80°(V) 垂直視野角は保証値。設定は90°まで可能。 |
| 垂直視野角はソフトにてダイナミックに変更可能 | |
| 距離精度*†※2 | 0.3m ~ 2m : < ±80mm / 2m ~ : < ±2.0% |
| 繰返し精度*†※2 | σ< 1.5% |
| 解像度 | QVGA:320×240 VGA:640×480 |
| フレームレート*† | 2 ~ 60Hz (垂直視野角等の設定により変化します) |
| 例QVGA,垂直走査90°(full-frame) : 9.25Hz (初期設定) | |
| 離散ライン走査速度*† | 840ライン/秒 |
| 1秒当たりの点群数 | 約500,000点/秒(初期設定時 : QVGA,垂直走査90°× 9.25Hz) |
| 角度分解能† | QVGA:0.375° VGA:0.188°(水平・垂直方向共に同じ) |
| 起動時間* | 60sec |
| インターフェース | Ethernet (1000BASE-T) |
| サイズ | 120(W)×57.2(D)×63.5(H)mm |
| 質量 | 650g |
| 光源 | VCSEL Laser ( λ= 905nm ) |
| 使用周囲温度 | -30℃~+50℃ 85%RH以下 (但し、結露・凍結がない事) |
| 保存温度 | -30℃~+70℃ 85%RH以下 (但し、結露・凍結がない事) |
| 耐振動性 | 10~55Hz 複振幅1.5mmp-p X,Y,Z方向 各2時間 |
| 55Hz~200Hz 98m/s2 (10G) スイープ2分 X,Y,Z方向 各1時間 | |
| 耐衝撃性 | 196m/s2 (20G) X,Y,Z方向 各10回 |
| 保護構造 | IP64 |
| レーザー安全クラス | クラス1(IEC60825-1準拠) |
†:Lidar のパフォーマンスは、Programmable Lidar API を通じてソフトウェアで定義されます。
*:特に記載がない場合、仕様は以下の条件です。
・弊社測定環境による
・周囲温度:25℃
・反射率 10%検出物
・320 × 240 (QVGA) 解像度
・軸上(視野中央部)
※1:検出距離は角度がつくと受光量が低下するため、精度が低下します。
※2:距離精度及び繰返し精度は以下の条件です。
・距離精度 : 中央部5×5 pixelの各pixel 100回計測の平均値を25箇所で平均した値
・繰返し精度: 中央部5×5 pixelの各pixel 100回計測の標準偏差を25箇所で平均した値
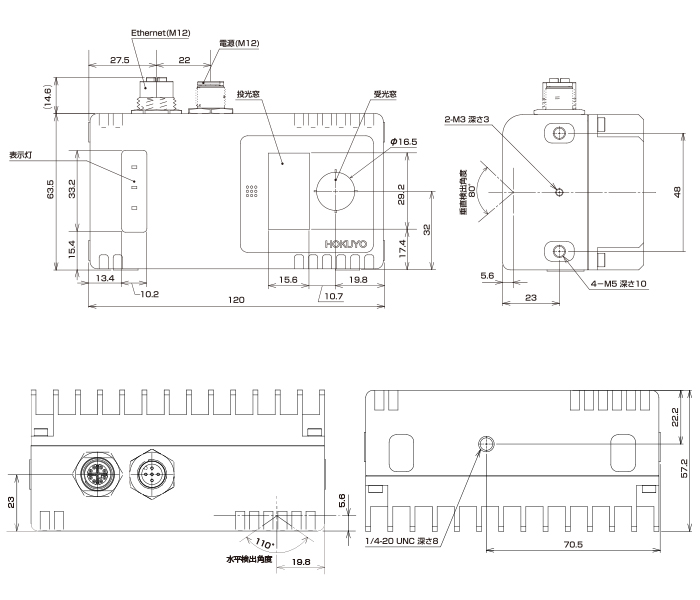
外形図
外形寸法図
入出力回路
コネクタピンアサイン
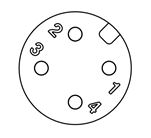
電源コネクタ
型式:Amphenol M12A-04PMMS-SF8001(M12 オス Aコード)
型式:Amphenol M12A-04PMMS-SF8001(M12 オス Aコード)
| PIN番号 | 機能 |
| 1 | +VIN +24VDC |
| 2 | 使用しない |
| 3 | -VIN 0VDC |
| 4 | 使用しない |
Ethernetコネクタ
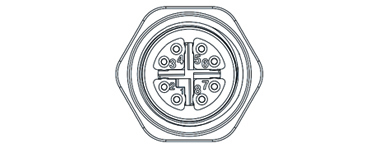
型式:NorComp Inc. 859-X08-203R0R4 (M12 メス Xコード)
| PIN番号 | 機能 |
| 1 | TX_D1+ |
| 2 | TX_D1- |
| 3 | RX_D2+ |
| 4 | RX_D2- |
| 5 | BI_D4+ |
| 6 | BI_D4- |
| 7 | BI_D3- |
| 8 | BI_D3+ |
電源用コネクタ付きケーブル(別売)
型式:Phoenix Contact SAC-4P-3,0-PUR/M12FS SH 3m (1682854)
センサ側(M12 メス Aコード ストレートコネクタ)/電源側 ばら線
センサ側(M12 メス Aコード ストレートコネクタ)/電源側 ばら線
| PIN番号 | 機能 | 線色 |
| 1 | +VIN | 茶 |
| 2 | 使用しない | 白 |
| 3 | -VIN | 青 |
| 4 | 使用しない | 黒 |
Ethernetコネクタ(別売)
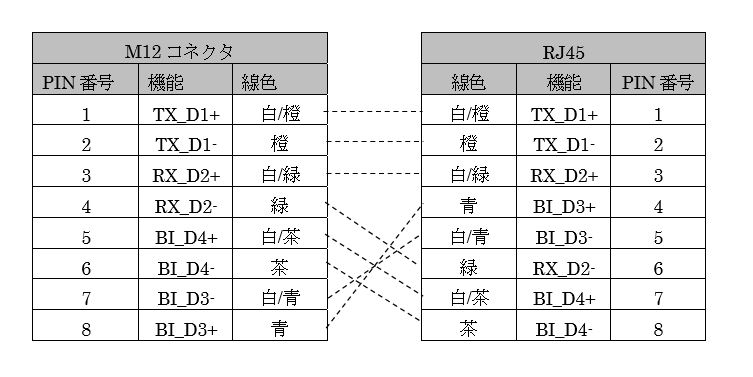
型式:Phoenix Contact NBC-M12MSX/2,0-94F/R4AC 2m (1407472)
センサ側(M12 オス Xコード ストレートコネクタ)/ホスト側(RJ45)
センサ側(M12 オス Xコード ストレートコネクタ)/ホスト側(RJ45)
各種ダウンロード
ダウンロードの前に
ファイルのダウンロードは会員様のみが可能です。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
資料ダウンロード用使用許諾
弊社各種商品の製品仕様・図面資料・各種資料及びソフトウェアのダウンロードに際して、事前にご利用規約をお読みいただき、ご理解・ご同意の上でご利用いただくようお願い申し上げます。
ご同意いただけない場合、ダウンロードページへの登録・承認ができないことをご了承ください。(なお、本利用規約は予告なく変更することがございます。)
利用規約
- 知的財産権
-
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
(以下コンテンツという)の著作権およびその他の権利は、当社またはその供給者が有します。 - 当社が当ウェブサイトに掲載しているコンテンツの二次的利用(複製、転用、改変、解析、送信、譲渡、貸与、使用許諾、及び営業活動または営利を目的とする使用等)は、事前に承諾がない限り固く禁止いたします。各ダウンロードサイトやコンテンツに個別の使用条件を記載している場合は、それらの利用条件を本利用規約に優先させて適用させていただきます。
- 当社は当ウェブサイトによるコンテンツの提供により、コンテンツに含まれる発明、デザイン等に対する特許権、意匠権その他の知的財産権の譲渡または当該知的財産権に基づくいかなる権利の許諾を行うものではありません。
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
- 免責事項
-
当社は、当ウェブサイトに掲載した情報には細心の注意を払っておりますが、以下の点に責任を負うものではありません。
- 掲載された情報が常に最新版であり、適時適切に更新、または訂正されていること。
- 掲載された情報が正確で、有用で、安全であること。
- 当ウェブサイトの情報の変更、削除、公開の中断、中止等、ご利用になったことによるお客様に生じた損害。
- 当ウェブサイトの利用によって起きた一切の損害。
ダウンロード一覧
| 分類 | ファイル名 | ファイル 容量 |
更新日 | ダウンロード |
|---|---|---|---|---|
【RS2】<暫定>YLM-10LX 製品仕様書 |
929KB |
2025-06-25 |
||
【RS2】YLM-10LX 外形寸法図 |
208KB |
2025-07-04 |
||
【RS2】YLM データ取得用通信仕様書 |
2,809KB |
2026-02-25 |
||
【RS2】YLM センサ設定用通信仕様書 |
5,067KB |
2026-02-25 |
||
【RS2】<暫定>YLM_viewer_1.0.1(R194)_installer |
14,664KB |
2025-06-19 |
||
【RS2】YLM-10LX 3DCAD(IGES/STEP/Parasolid) |
8,562KB |
2025-08-26 |
||
【RS2】YLM-10LX 総合カタログ |
1,522KB |
2026-04-02 |
プログラミングについて

【URG Network】
データ出力タイプ測域センサのプログラミングについて説明しているサイトです。
YLMシリーズのサンプルプログラム、ROS/ROS2でYLMを使用する方法についての解説を
ご参照ください。
データ出力タイプ測域センサのプログラミングについて説明しているサイトです。
YLMシリーズのサンプルプログラム、ROS/ROS2でYLMを使用する方法についての解説を
ご参照ください。

【技術コミュニティ】
測域センサ(データ出力タイプ)の専門的なプログラミングやソフトに関するご相談については、
技術コミュニティもご用意しております。
※日本語でも大丈夫です!
測域センサ(データ出力タイプ)の専門的なプログラミングやソフトに関するご相談については、
技術コミュニティもご用意しております。
※日本語でも大丈夫です!
よくある質問
-
光学面が汚れてしまいましたが清掃の方法を教えてください。
製品の使い方「光学窓のお手入れ方法」に記載がございますのでご参照ください。
-
取得できるデータを教えてください。
3次元(X, Y, Z)の距離データと受光強度です。
同カテゴリの他の製品を見る












製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
