製品詳細
PRODUCT DETAIL

自己位置推定センサシステム RSF-X001
応用システムリテールソリューション
【自律走行に必要なデータをこれ一台で】
自社の3DLiDARを活用し、 LiDARオドメトリ(LIO)・IMU・GNSSを融合した自己位置推定センサシステムを開発しました。
屋内・屋外を問わない高精度位置推定でお客様のロボット開発をサポート、自律走行の難しさを解決します。
ROS対応
製品概要
「高精度な自己位置出力」
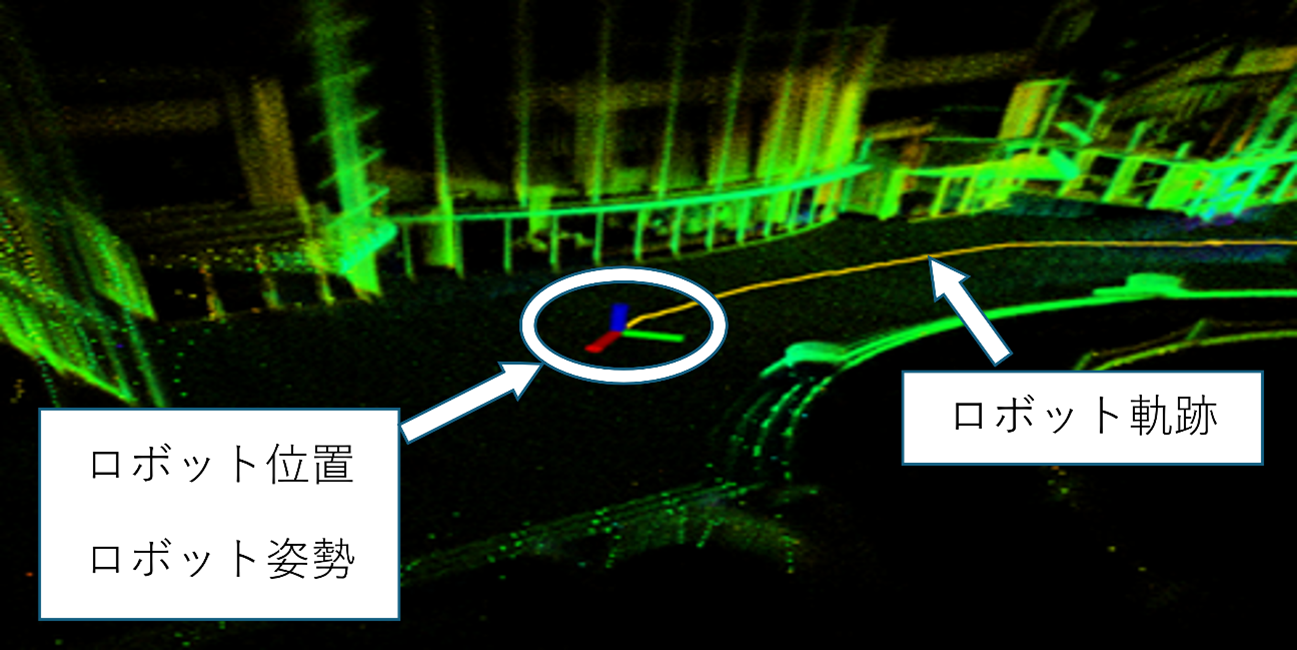
3D LiDARとIMUとGNSSから構成。この3つを組み合わせて、高精度な自己位置推定を可能にした次世代センサです。
LIO(LiDAR Inertial Odometry)とRTK-GNSSの技術を活用しています。
LIO(LiDAR Inertial Odometry)とRTK-GNSSの技術を活用しています。
「高精度な測位を屋内外でシームレスに実現」

LIOとGNSSをリアルタイムに比較し、安定した一方を選択します。
選択した位置情報を内部で演算し、移動量と緯度経度の双方で出力します。
※画像:地理院タイル(全国最新写真(シームレス)(https://maps.gsi.go.jp/development/ichiran.html)をもとに北陽電機株式会社作成
選択した位置情報を内部で演算し、移動量と緯度経度の双方で出力します。
※画像:地理院タイル(全国最新写真(シームレス)(https://maps.gsi.go.jp/development/ichiran.html)をもとに北陽電機株式会社作成
「経路設計に必要な地図作成も可能」
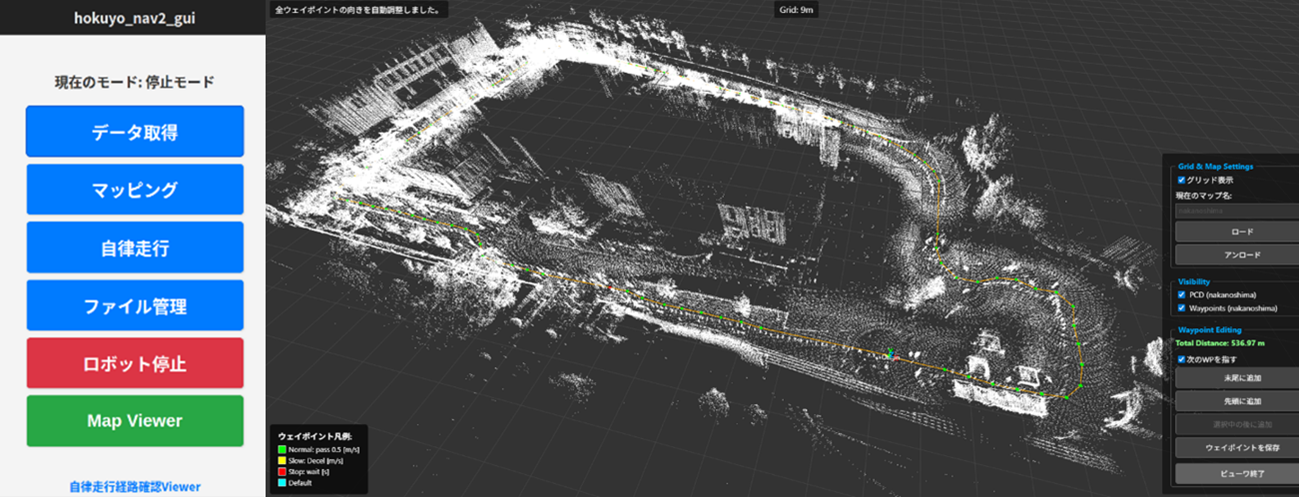
北陽電機提供のROSパッケージを別途ダウンロードし活用頂くことで、データ取り・地図作成・自律走行までをブラウザGUIのみで実行可能です。
GNSSとLIOを組み合わせてグローバルな座標※1を付与した地図が作成できます。
※1 UTM座標系:地球を60ゾーンに分け、丸い地球の表面を平面として扱うことで、距離や面積を正確に計算しやすくした投影座標系
GNSSとLIOを組み合わせてグローバルな座標※1を付与した地図が作成できます。
※1 UTM座標系:地球を60ゾーンに分け、丸い地球の表面を平面として扱うことで、距離や面積を正確に計算しやすくした投影座標系
「ROS2ドライバ提供」
ROS2トピックへ変換するためのドライバを提供します。
(センサ-PC間の通信はTCP/IP独自プロトコルです。)
推奨:ros2 humble(Ubuntu22.04)
・rsf_ros2node_jpについて
・Github :hokuyo_navigation2
(センサ-PC間の通信はTCP/IP独自プロトコルです。)
推奨:ros2 humble(Ubuntu22.04)
・rsf_ros2node_jpについて
・Github :hokuyo_navigation2
GNSSとLIOの切替の様子
動画のようにGNSSの精度が低い場所でも、LiDARのデータを用いて自己位置推定が可能となっております
型式一覧
本体
RSF-X001
付属品:電源ケーブル

M12コネクタ付き、3m
付属品:Ethernetケーブル

M8コネクタ付き、3m
付属品:GNSSアンテナ

SMAコネクタケーブル付き、5m
製品仕様
製品仕様
※1 電流容量に十分な余裕を持った電源をご使用ください。
※2 外光の直射時は検出が保証できません。(西日などが入らないよう配慮願います)
自己位置推定仕様
※3 独立した観測物が最低3個所あること
※4 本センサは環境条件(雨・雪・霧など)や光学カバーの汚れが原因で、動作が不安定になる可能性があります。
※5 屋外・日本のみ
測域センサ
GNSS
| 品名 | 自己位置推定センサ | 型式 | RSF-X001 |
| 電源電圧 | DC 12V |
| 消費電力 | 60W ※1 |
| インターフェース | Ethernet 100BASE-TX |
| 質量 | 約 3kg |
| 使用周囲温度 | -10℃~+50℃ 85%RH以下 (但し、結露・凍結がない事) |
| 使用周囲照度 | 100,000 lx(直接太陽光方向は除く)※2 |
| 耐振動 | 10~55Hz複振幅1.5mm X,Y,Z方向 各2時間 |
| 耐衝撃 | 196m/s2(20G) X,Y,Z方向 各10回 |
| 保護構造 | IP65 |
| 外形寸法(W×H×D) | 147mm×153.5mm×211mm |
※2 外光の直射時は検出が保証できません。(西日などが入らないよう配慮願います)
自己位置推定仕様
| 精度(LiDAR) | 移動距離±0.2%(社内試験環境にて) (100m移動時、環境に依存)※3、※4 |
| 精度(GNSS) | 誤差 1.5cm |
| (オープンスカイ環境・定点観測1時間) ※5 | |
| 出力頻度 | 20Hz ~ 1000Hz |
※4 本センサは環境条件(雨・雪・霧など)や光学カバーの汚れが原因で、動作が不安定になる可能性があります。
※5 屋外・日本のみ
測域センサ
| 型式 | YVT-35LX-FK (北陽電機 製) |
| レーザ波長 | 905nm |
| レーザ保護クラス | レーザクラス1 |
| 出力周期(点群) | 20Hz |
| 出力周期(IMU) | 1000Hz |
GNSS
| 方式 | RTK-GNSS |
| 使用サービス | ichimill |
| 対応衛星 | GPS / QZSS / GLONASS /Galileo / BeiDou |
| 対応周波数 | L1 / L2 |
| NMEA出力 | GGA / RMC / ZDA |
| 出力周期 | 1Hz |
| 使用モジュール | ZED-F9P-05B-00 |
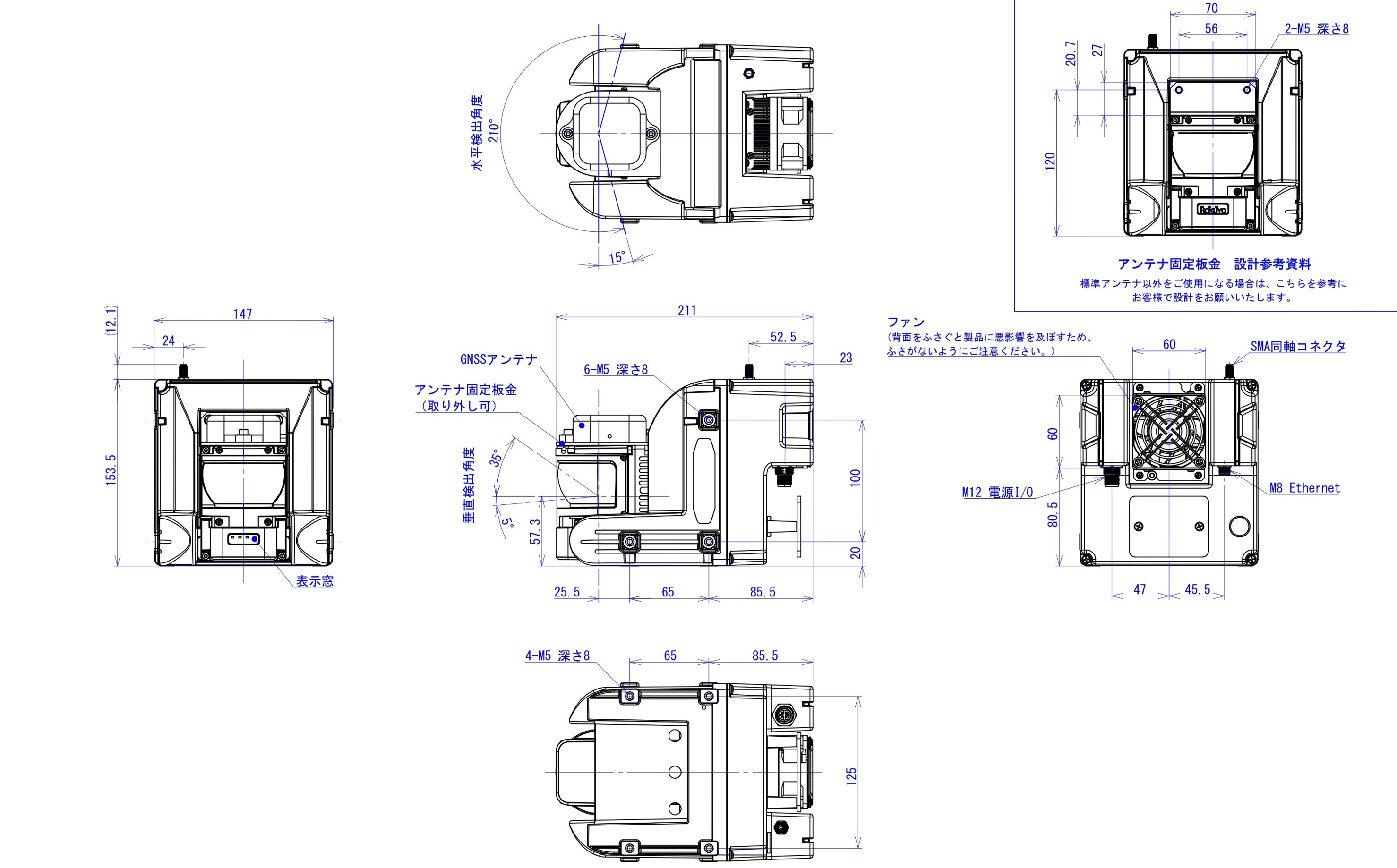
外形図
各種ダウンロード
ダウンロードの前に
ファイルのダウンロードは会員様のみが可能です。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
資料ダウンロード用使用許諾
弊社各種商品の製品仕様・図面資料・各種資料及びソフトウェアのダウンロードに際して、事前にご利用規約をお読みいただき、ご理解・ご同意の上でご利用いただくようお願い申し上げます。
ご同意いただけない場合、ダウンロードページへの登録・承認ができないことをご了承ください。(なお、本利用規約は予告なく変更することがございます。)
利用規約
- 知的財産権
-
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
(以下コンテンツという)の著作権およびその他の権利は、当社またはその供給者が有します。 - 当社が当ウェブサイトに掲載しているコンテンツの二次的利用(複製、転用、改変、解析、送信、譲渡、貸与、使用許諾、及び営業活動または営利を目的とする使用等)は、事前に承諾がない限り固く禁止いたします。各ダウンロードサイトやコンテンツに個別の使用条件を記載している場合は、それらの利用条件を本利用規約に優先させて適用させていただきます。
- 当社は当ウェブサイトによるコンテンツの提供により、コンテンツに含まれる発明、デザイン等に対する特許権、意匠権その他の知的財産権の譲渡または当該知的財産権に基づくいかなる権利の許諾を行うものではありません。
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
- 免責事項
-
当社は、当ウェブサイトに掲載した情報には細心の注意を払っておりますが、以下の点に責任を負うものではありません。
- 掲載された情報が常に最新版であり、適時適切に更新、または訂正されていること。
- 掲載された情報が正確で、有用で、安全であること。
- 当ウェブサイトの情報の変更、削除、公開の中断、中止等、ご利用になったことによるお客様に生じた損害。
- 当ウェブサイトの利用によって起きた一切の損害。

製品カテゴリ
- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
お役立ち情報
