
URM-40LC/LCN-EW

距離40m、270°の範囲を計測する屋外用レーザスキャナ(LiDAR)。エリア設定タイプとデータ出力タイプを切替可能。マルチエコー対応で雨、霧などの分離又はフィルタが可能、光学窓の汚れ検知機能もあり屋外での環境認識(SLAM)、各種屋外計測、障害物検知がこれ一台で。ROS対応。
製品概要
特徴
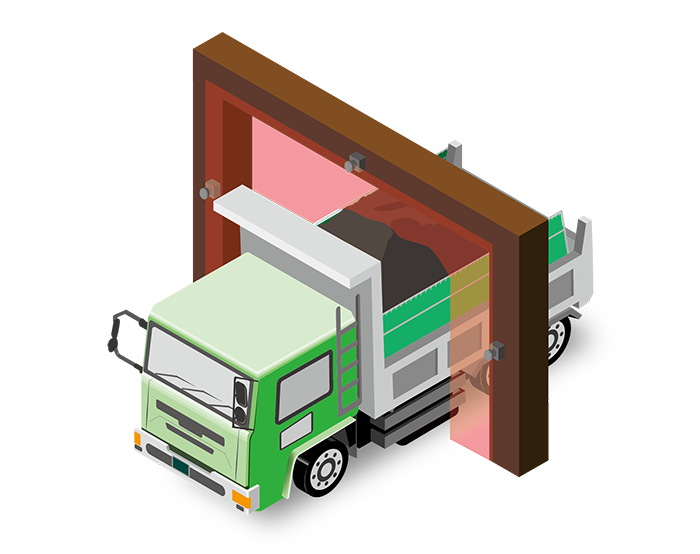
さまざまな屋外環境で周囲環境の認識や侵入、障害物検知に活躍します。
270°・40mの広範囲をスキャン
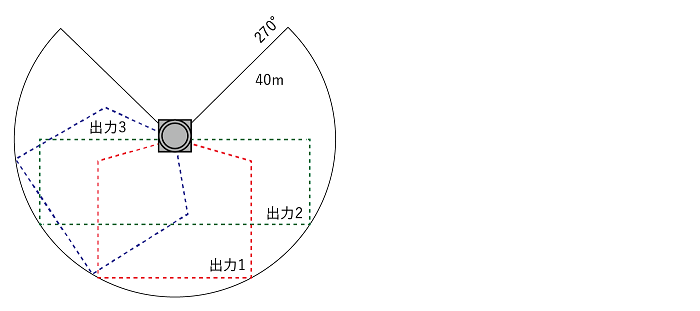
LAモード(エリア設定モード)時は用途に応じて3つの独立したエリアを自由に設定可能です。
マルチエコーと各種屋外フィルタで霧や雨にも強く
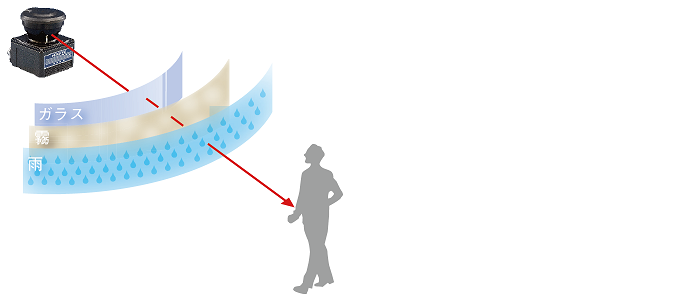
LAエリア設定モードの場合は各種屋外フィルタを搭載しており、雨、霧などにも強くなっています。
雨フィルタ………エリア内を移動するものやランダムに検出するものに対するフィルタです。
霧フィルタ………空中に漂う霧や煙に対するフィルタです。
感度フィルタ……反射が弱いものを除去するフィルタです。外乱光や雨などのノイズの除去に効果があります。
エコーフィルタ…雨粒やガラス面、物体の境目などの入射により複数エコーがある環境では、エコーフィルタを
選択することで、最初のエコーまたは最後のエコーで判定することができます。
※フィルタを適用することで、感度や応答速度に影響し、検出できなくなることがあります。
設定後は実機による十分な検証を行ってください。
光学窓汚れ警報機能搭載
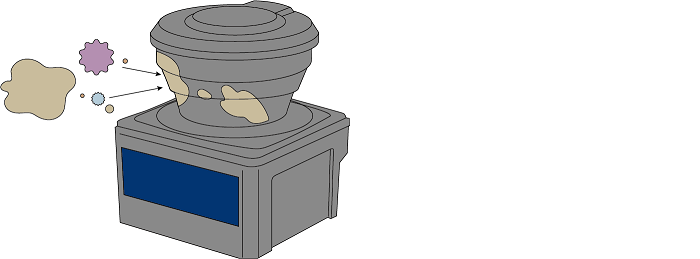
メンテナンス用信号として利用することで、機器が動作不能となる前にメンテナンスが行えます。
※定期的な光学窓の清掃は行ってください。
高精度・高分解能でより正確に
角度分解能0.125°(高分解能モード)
距離平均精度 0.1~30m:±20mm、30~40m:±30mm、繰返し精度 0.1~20m:σ<10mm、20~40m:σ<15mm
コンパクトサイズで取付場所に困りません
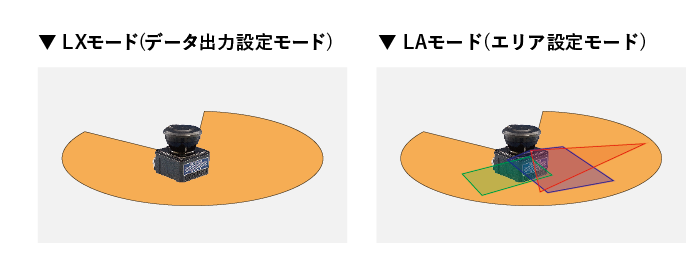
2つのタイプ機能を1台で選択可能
屋外環境における設備の居残り・侵入検知用途、ロボットやAGVなどの自己位置推定用途に一台で対応が可能です。
各種設定は専用アプリケーションソフトで簡単
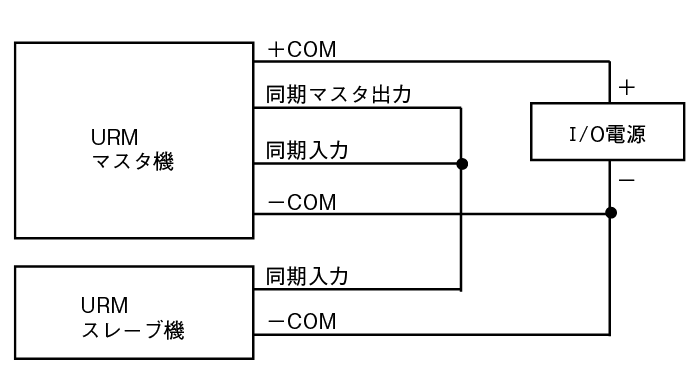
干渉防止機能を搭載
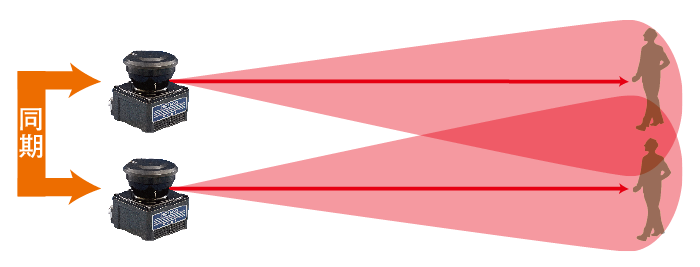
センサを複数台同時に用いたときの干渉の影響を軽減します。
※同期マスタ機能を使用する場合、検知出力1、2のみになります
。 また、干渉や瞬間的な誤動作を防ぐディレー機能も搭載。
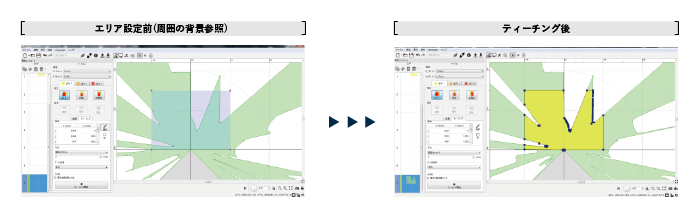
ティーチング機能 自動で簡単領域設定
飛び地エリア設定が可能
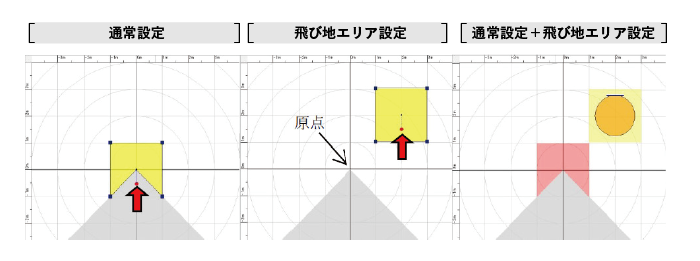
※飛び地エリアの前に障害物があった場合検出しません。
導入事例


形式一覧
| 型式 | 品コード | 出力 |
| URM-40LC-EW | UURM001 | PNP出力 |
| URM-40LCN-EW | UURM003 | NPN出力 |
■電源ケーブル (別売り)
| 型式 | 品コード | 長さ |
| URM-C005 | UZ00112 | 5m |
■Ethernetケーブル (別売り)
| 型式 | 品コード | 長さ |
| URM-ENET003 | UZ00113 | 3m |
| URM-ENET005 | UZ00114 | 5m |
電源ケーブル
Ethernetケーブル

製品仕様
| 品名 | 測域センサ |
| 型式 | URM-40LC-EW(PNP出力) / URM-40LCN-EW(NPN出力) |
| 光源 | 半導体レーザー λ= 905nm 、レーザー安全クラス1 |
| 電源電圧 | DC10~30V |
| 電源電流*3 | 定常時電流 DC12V時 700mA以下 |
| 起動時電流 DC12V時 1.3A(typ.) | |
| 消費電力 | 8.4W以下(定常時) |
| 検出距離及び検出体 | 検出保証値:0.1~40m*1 (反射率90%白ケント紙 500mm×500mm) 0.1~18m*1 (反射率10%黒紙 500mm×500mm) |
| 最大検出距離 :60m | |
| 最小検出物 通常モード: 65mm(5m)、130mm(10m)、260mm(20m) 高分解能モード: 33mm(5m)、65mm(10m)、130mm(20m) |
|
| 距離平均精度 | 反射率90%白ケント紙 0.1~30m:±20mm*1、30~40m:±30mm*1 |
| 測定分解能 | 1mm 単位 |
| 繰返し精度 | 反射率90%白ケント紙 0.1~20m:σ<10mm*1、20~40m:σ<15mm*1 |
| 走査角度 | 270° |
| 角度分解能/走査時間 | 0.25゜/25ms (通常モード) |
| 0.125゜/50ms (高分解能モード) | |
| インタフェース | Ethernet 100BASE-TX (Auto-negotiation) |
| 出力 | OUTPUT 5点:検知1/同期出力, 検知2, 検知3/同期マスタ、Ready、故障 |
| 入力 | INPUT 3点:エリア1, エリア2, エリア3/同期入力 (エリア最大:全7パターン) |
| 出力応答時間 | 50ms以下(但し設定により変化します) |
| 起動時間 | 電源投入から15秒以内で動作。 |
| 表示灯 | 電源・動作表示灯(青)、エリア判定表示灯(橙) |
| 使用周囲温度、湿度 | -10~+50℃ 85%RH ※但し、結露、凍結が無いこと |
| 使用周囲照度 | 100,000lx*2 |
| 耐振動 | 10~55Hz 複振幅1.5mm X、Y、Z方向 各2時間 |
| 55~200Hz 98m/s2(10G)スイープ2分 X、Y、Z方向 各1時間 | |
| 耐衝撃 | 196m/s2(20G) X、Y、Z方向 各10回 |
| 保護構造 | IP67 |
| 絶縁抵抗 | 10MΩ |
| 質量 | 約450g(本体のみ) |
| ケース材質 | 光学窓:ポリカーボネート 本体:アルミダイキャスト |
注)*1室内環境にて(蛍光灯 1,000lx以下)
*2外光の直射時は検出が保証できません(西日などが入らないよう配慮願います)。
*3電源容量に十分な余裕を持った電源をご使用ください。
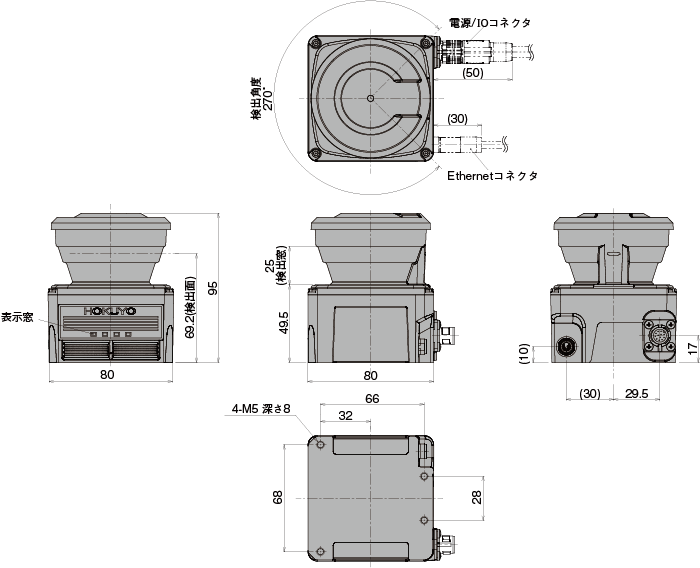
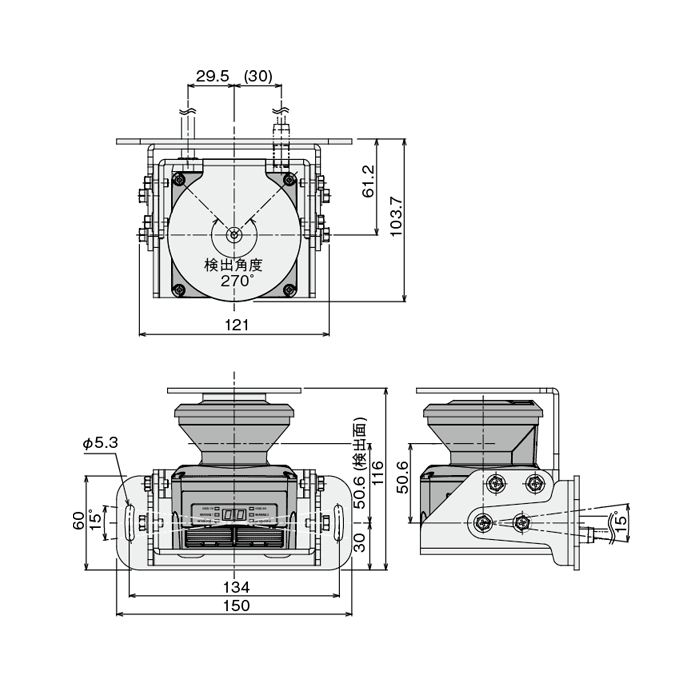
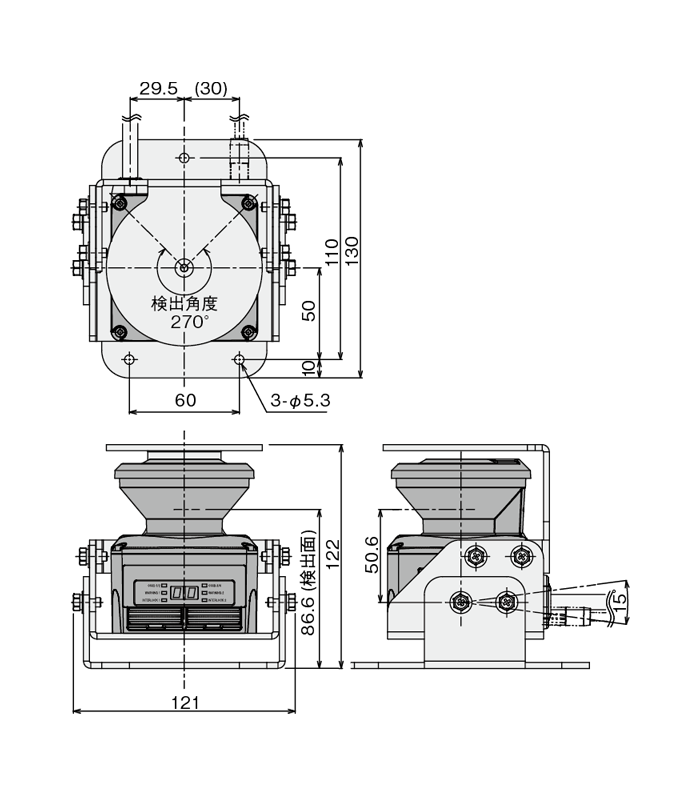
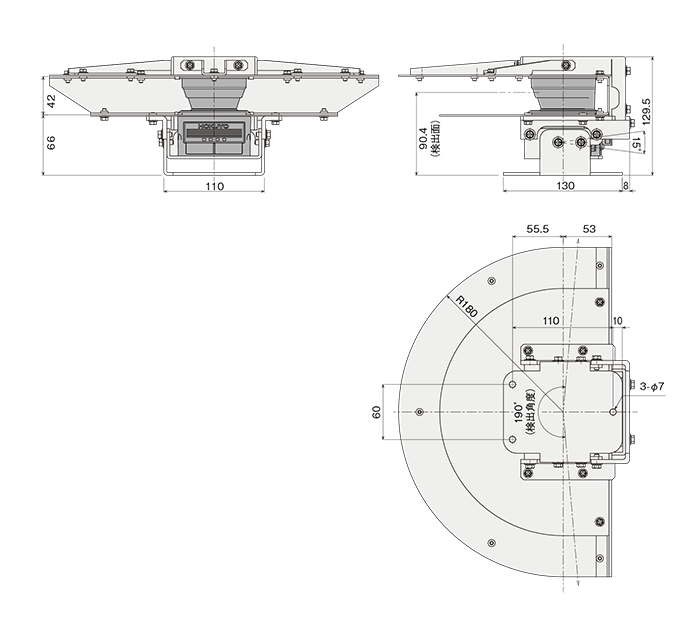
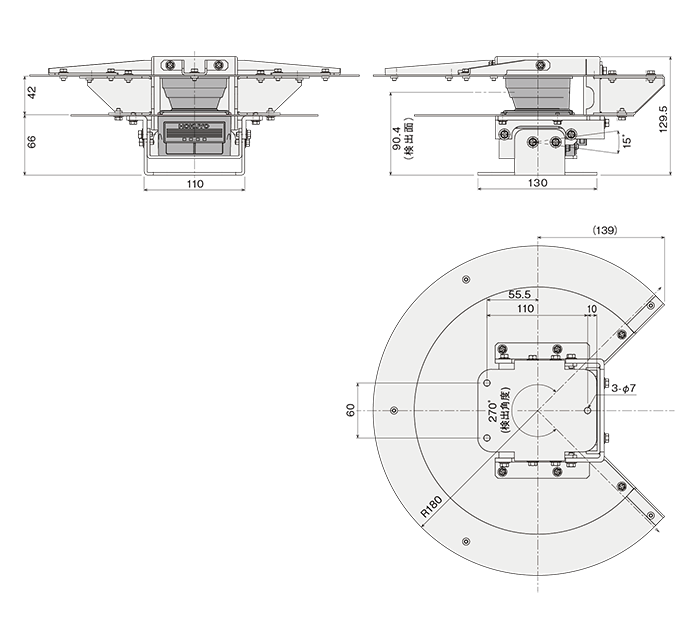
外形図
本体
背面取付金具取付状態
底面取付金具取付状態
屋外フード 190°取付状態
屋外フード 270°取付状態
入出力回路
URM-40LC-EW PNP出力タイプ
URM-40LCN-EW NPN出力タイプ
URM-40LC-EW PNP出力タイプ 入出力回路接続例
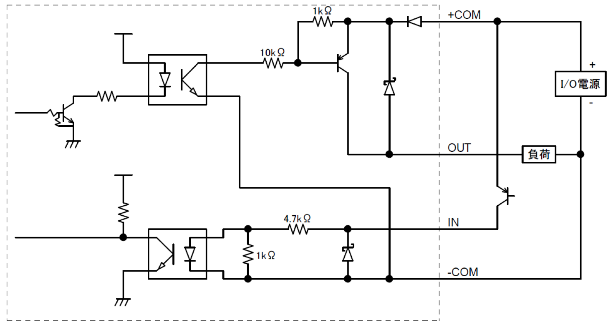
入力:フォトカプラ入力
カソードコモン、各入力ON電流2mA、OFF電流0.5mA
出力:PNPオープンコレクタ
最大出力電流50mA、最大印加電圧30V
URM-40LCN-EW NPN出力タイプ 入出力回路接続例
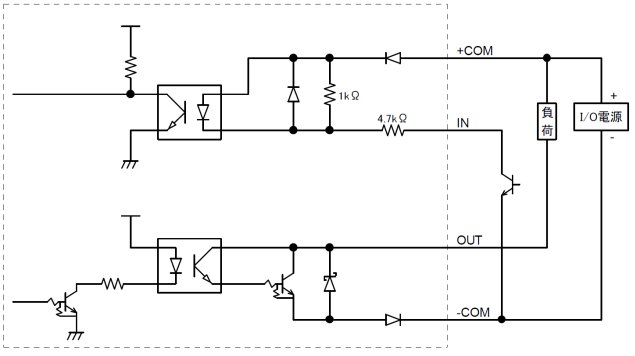
入力:フォトカプラ入力
アノードコモン、各入力ON電流2mA、OFF電流0.5mA
出力:NPNオープンコレクタ
最大出力電流50mA、最大印加電圧30V
同期配線例
電源・入出力コネクタ

PHOENIX CONTACT 品番:1441707
| ■電源・入出力信号コネクタ |
|
|
Ethernetコネクタ

PHOENIX CONTACT 品番:1456093
| ■Ethernetコネクタ |
|
オプション
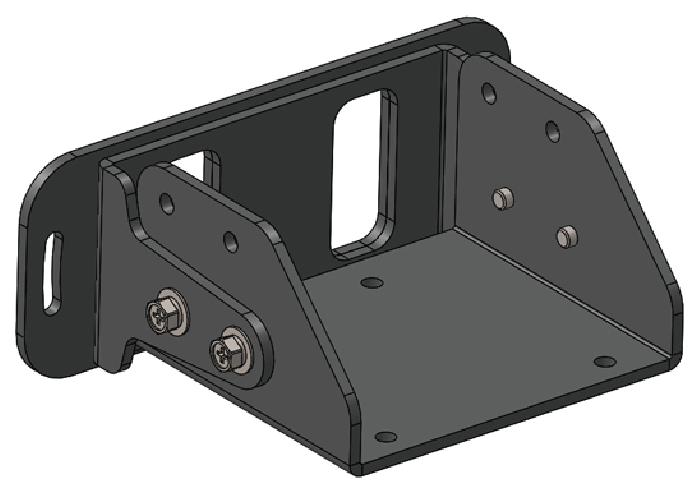
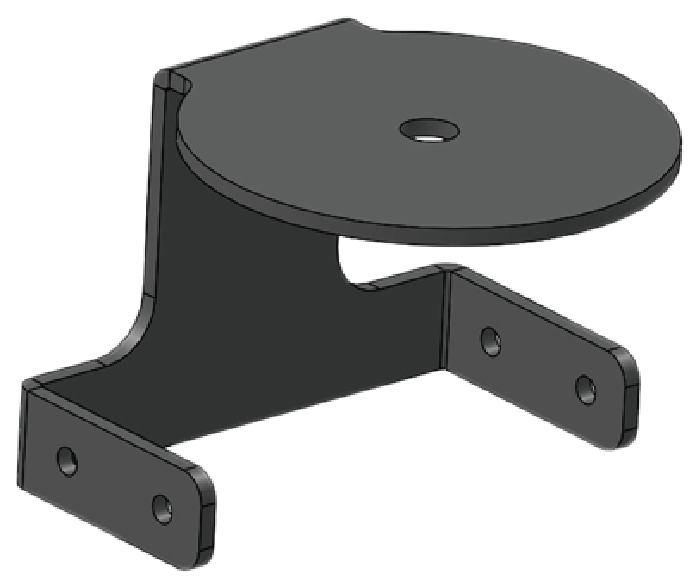
■取付金具(別売)
| 形式 | 品コード | 仕様 | 備考 |
| URM-BK01 | UZ00115 | 底面取付金具 | URMの垂直方向の取付け角度を変更できます。 |
| URM-BK02 | UZ00116 | 背面取付金具 | URMの垂直・水平方向の取付け角度を変更できます。 |
| URM-BK03 | UZ00117 | カバー金具 | 底面又は背面取付金具と組み合わせて光学窓を保護します。 |
| URM-BK04 | UZ00129 | 屋外フード 190° | 計測範囲190° |
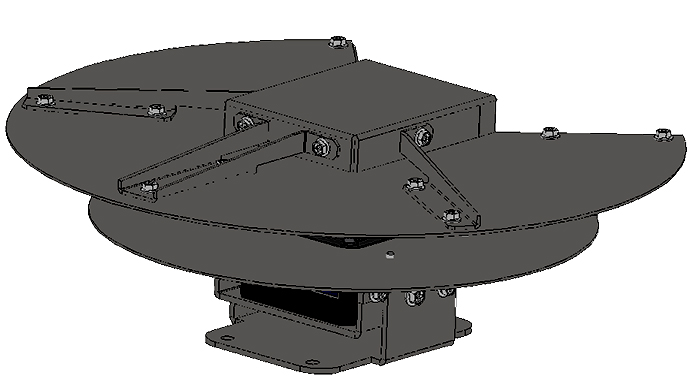
| URM-BK05 | UZ00130 | 屋外フード 270° | 計測範囲270° |
底面取付金具
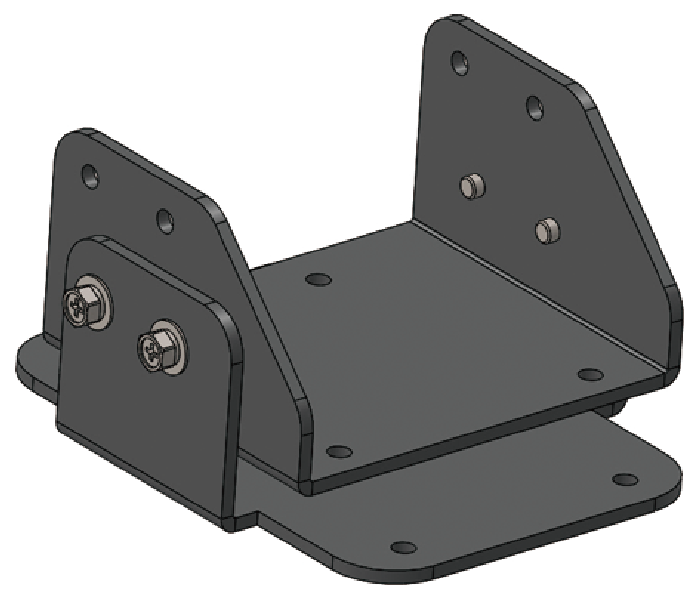
背面取付金具
カバー金具
屋外フード 190°
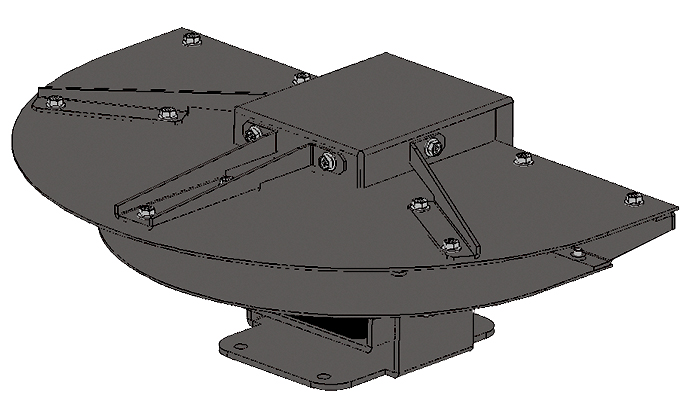
屋外フード 270°
各種ダウンロード
ダウンロードの前に
会員登録されていない場合は、「会員登録」ボタンより会員登録を行ってください。
既に会員の方は、下記の規約に同意いただき、「同意する」ボタンをクリックしてください。
資料ダウンロード用使用許諾
弊社各種商品の製品仕様・図面資料・各種資料及びソフトウェアのダウンロードに際して、事前にご利用規約をお読みいただき、ご理解・ご同意の上でご利用いただくようお願い申し上げます。
ご同意いただけない場合、ダウンロードページへの登録・承認ができないことをご了承ください。(なお、本利用規約は予告なく変更することがございます。)
利用規約
- 知的財産権
-
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
(以下コンテンツという)の著作権およびその他の権利は、当社またはその供給者が有します。 - 当社が当ウェブサイトに掲載しているコンテンツの二次的利用(複製、転用、改変、解析、送信、譲渡、貸与、使用許諾、及び営業活動または営利を目的とする使用等)は、事前に承諾がない限り固く禁止いたします。各ダウンロードサイトやコンテンツに個別の使用条件を記載している場合は、それらの利用条件を本利用規約に優先させて適用させていただきます。
- 当社は当ウェブサイトによるコンテンツの提供により、コンテンツに含まれる発明、デザイン等に対する特許権、意匠権その他の知的財産権の譲渡または当該知的財産権に基づくいかなる権利の許諾を行うものではありません。
- 当ウェブサイトに公開されている文章、データやソフトウェアなどのコンテンツ
- 免責事項
-
当社は、当ウェブサイトに掲載した情報には細心の注意を払っておりますが、以下の点に責任を負うものではありません。
- 掲載された情報が常に最新版であり、適時適切に更新、または訂正されていること。
- 掲載された情報が正確で、有用で、安全であること。
- 当ウェブサイトの情報の変更、削除、公開の中断、中止等、ご利用になったことによるお客様に生じた損害。
- 当ウェブサイトの利用によって起きた一切の損害。
ダウンロード一覧
| 分類 | ファイル名 | ファイル 容量 |
更新日 | ダウンロード |
|---|---|---|---|---|
URM-40LC-EW 仕様書 PNP出力 |
--- |
2020-03-11 |
||
URM-40LCN-EW 仕様書 NPN出力 |
--- |
2020-04-10 |
||
URM-40LC/LCN-EW 外形寸法図 |
--- |
2019-05-13 |
||
URM/UGM通信仕様書 |
--- |
2021-03-24 |
||
URM-40LC-EW ユーザーズマニュアル PNP出力 |
--- |
2020-03-11 |
||
URM-40LCN-EW ユーザーズマニュアル NPN出力 |
--- |
2020-04-10 |
||
URM スタートガイド |
--- |
2020-04-24 |
||
エリア設定用アプリケーションAreaDesigner マニュアルセンサ個別の機能設定方法についてはセンサ個々のユーザーズマニュアルを参照してください。 |
--- |
2022-11-17 |
||
エリア設定用アプリケーションAreaDesigner_3.1.0(R.3172_C.369)_installer |
--- |
2023-07-10 |
||
IP Discovery_2.2(rev.86)(IPアドレス変更ツール) |
--- |
2024-03-15 |
||
URM-40LC-EW専用ファームウエアアップデートツール(ファームウエア1.2.0)型式に注意してください、型式2種類あります |
--- |
2024-03-13 |
||
URM-40LCN-EW専用ファームウエアアップデートツール(ファームウエア1.1.0)型式に注意してください、型式2種類あります |
--- |
2024-03-13 |
||
URM-40LC/LCN-EW 2DCAD(dxf)データ |
--- |
2019-05-13 |
||
URM-40LC/LCN-EW用オプション取付金具 2DCAD(dxf)データ |
--- |
2020-10-01 |
||
URM-40LC/LCN-EW用オプション取付金具_3DCAD(IGES_STEP)データ |
--- |
2020-10-01 |
||
URM-40LC/LCN-EW_3DCAD(IGES_STEP)データ |
--- |
2019-05-13 |
||
URM-40LC-EW 総合カタログ |
--- |
2023-05-19 |
プログラミングについて

データ出力タイプ測域センサのプログラミングについて説明しているサイトです。
よくある質問
-
PCに接続しましたがPCがセンサを認識しません。
PCのIPアドレスを設定する必要があります。 詳しくは「イーサネットタイプの測域センサをPCに接続する」をご参照ください。
-
光学面が汚れてしまいましたが清掃の方法を教えてください
製品の使い方「光学窓のお手入れ方法」に記載がございますのでご参照ください。
-
アプリケーションにてエリア1に検出エリアを作成して書き込みを押してモニター画面にいくと、検出波形が動かなくなりました。
エリア1は、エリア入力2と3をONにする必要があります。エリア入力が全てOFFの場合はエリア7に検出エリアを作成してください。(同期を使用しない場合)
-
LXモードとLAモードの違いを教えてください。
LXモードは角度ごとの計測したデータを通信により出力するモードです。
LAモードはエリア設定をしてエリア内に検出物がある場合、制御出力が動作するモードです。距離データも通信で取得できますがマルチエコー信号など一部の機能が制限されています。
機能の詳細についてはユーザーズマニュアル及び通信仕様書をご確認お願いします。 -
IPの変更、初期化はどうすればいいですか。
専用アプリケーション(IP Discovery )にて IP 変更および初期化が可能です。各種ダウンロードにてダウンロード可能です。
-
PNP出力への接続方法を教えてください。
PNPトランジスタのオープンコレクタ出力となりますので、+COM( 白)に電源の+側(茶)を接続して、出力1(灰)に接続する負荷の+側を接続、負荷の-側を電源の-側(青)に接続します。 出力2、3も同様に接続します。
オープンコレクタ出力については下記を参照お願いします。
製品の原理 用語解説「NPN/PNPオープンコレクタ出力」 -
NPN出力への接続方法を教えてください。
NPNトランジスタのオープンコレクタ出力となりますので、-コモンに電源の-側を接続して、出力1に接続する負荷の-側を接続、負荷の+側を電源の+側に接続します。 出力2、3も同様に接続します。
オープンコレクタ出力については下記を参照お願いします。
製品の原理 用語解説「NPN/PNPオープンコレクタ出力」 -
NPN出力への接続方法を教えてください。
NPNトランジスタのオープンコレクタ出力となりますので、-COM( 黒)に電源の-側(青)を接続して、出力1(灰)に接続する負荷の-側を接続、負荷の+側を電源の+側(茶)に接続します。 出力2、3も同様に接続します。
オープンコレクタ出力については下記を参照お願いします。
製品の原理 用語解説「NPN/PNPオープンコレクタ出力」 -
検出時の出力論理を変更したい。
アプリケーションソフトでセンサ設定で変更できます。
出力ロジック「Active Low」で検出時に出力オフ(初期設定値)
出力ロジック「Active High」で検出時に出力オンに設定できます。
但し、故障出力、Ready出力は論理変更できません
出力トランジスタの動作については下記を参照お願いします。
製品の原理 用語解説「NPN/PNPオープンコレクタ出力」 -
ヒステリシスを設定するとどうなりますか
センサがエリアの境界付近で物体を検出すると、出力1~3がON/OFF を繰り返す可能性があります。これを解消するために、エリア内で物体を検出すると、エリアを決められた比率で拡大する 機能です。ヒステリシスの設定はエリア毎の設定と リージョン 毎の設定が選択できます。設定値についてはユーザズマニュアルを参照おねがいします。物体がエリア内から検出されなくなると、元のエリア設定に戻ります。
ヒステリシスの動作については下記を参照お願いします。
製品の原理 用語解説「ヒステリシスとは」 -
オンディレイとオフディレイを設定するとどうなりますか
オンディレイは非検知状態から検知状態へ移行するときの応答時間になります。
オフディレイは検知状態から非検知状態へ移行するときの応答時間になります。
ディレイの設定はエリア毎の設定と リージョン 毎の設定が選択でき、設定範囲はユーザーズマニュアルをご参照お願いします。
また、出力の論理を変更してもディレイの動作は変化しません。
ディレイの動作については下記を参照お願いします。
製品の原理 用語解説「オンディレイ、オフディレイとは」 -
センサが相互干渉します、対策方法は
基本的には設置位置を変更することをお勧めします。
また、同期接続を行い設定することで相互干渉を軽減させることも可能です。
設置位置や同期接続及び設定方法についてはユーザズマニュアルを参照してください。
同期接続の原理については下記を参照お願いします。
製品の原理 用語解説「同期入力 / 同期マスタ出力」
同カテゴリの他の製品を見る










- 測域センサ
- 光電・レーザーセンサ
- 鉄鋼・クレーンセンサ
- 応用システム
- 光データ伝送装置
- カウンタ
- 自動ドア
